本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/database/18870.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
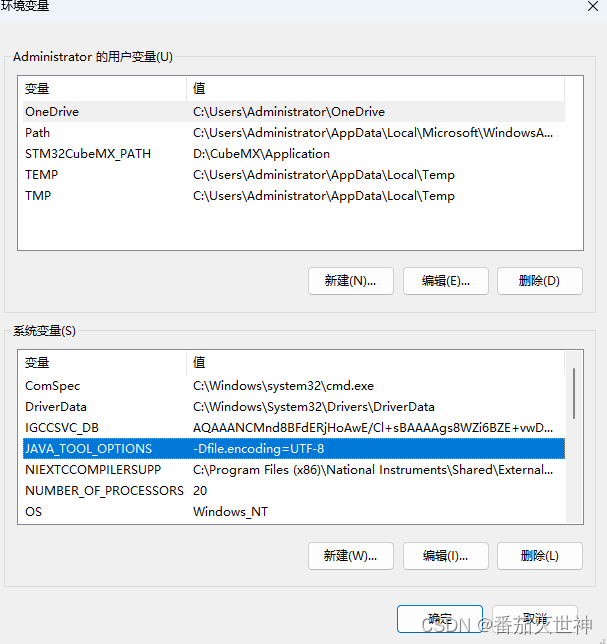
CubeMX重写配置生成代码后注释出现乱码的解决方式
1.搜索环境变量 2.就是这里,每个版本Windows可能不太一样 3.新建 4.系统变量下面新建
变量:JAVA_TOOL_OPTIONS
值:-Dfile.encodingUTF-8
如果还不行,那我也没辙,哈哈。

国外大模型使用成本比较
计算每种层级的LLM使用的大致总成本。考虑到每次使用LLM需要3个输入token产生1个输出token的假设,我们可以这样估算总成本: 计算单次使用的token总数: 输入token:3个输出token:1个总计:3输入 1输出 4个to…
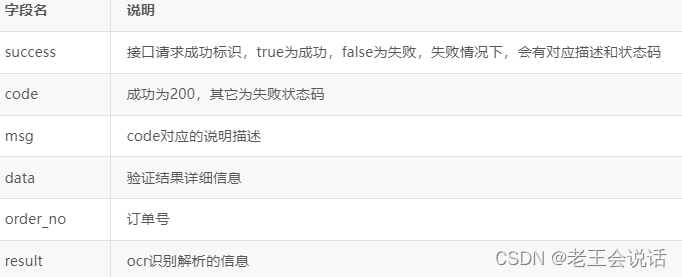
驾驶证OCR识别接口如何对接
驾驶证OCR识别接口也叫驾驶证文字识别OCR接口,指的是传入驾驶证照片,精准识别静态驾驶证图像上的文字信息。那么驾驶证OCR文字识别接口如何对接呢?
首先我们找到一家有驾驶证OCR识别接口的服务商,数脉API,然后注册账户࿰…

基于UDP协议Python通信网络程序(服务器端+客户端)及通信协议在自动驾驶场景应用示例
一、UDP协议
UDP(用户数据报协议)是一种无连接的传输层协议,具有简单、高效的特点,适用于一些对数据可靠性要求不高的应用场景。UDP的主要特点包括无连接、不可靠和面向数据报。这意味着在发送数据之前不需要建立连接,…

在做题中学习(53):寻找旋转数组中的最小值
153. 寻找旋转排序数组中的最小值 - 力扣(LeetCode) 解法:O(logn)->很可能就是二分查找
思路:再看看题目要求,可以画出旋转之后数组中元素的大小关系:
首先,数组是具有二段性的(适配二分查…
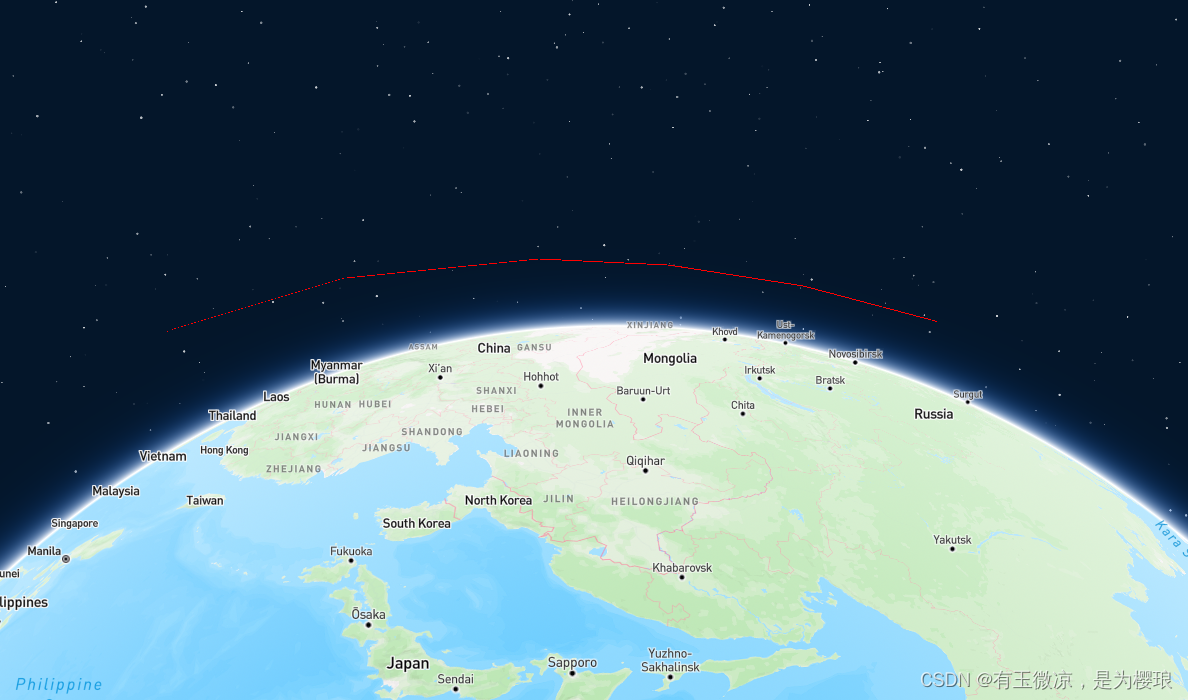
Mapbox实现高度线
贴个群号
WebGIS学习交流群461555818,欢迎大家
效果图 实现与源码
本文主要是提供一个思路,如何利用纯mapbox实现,效果图也只是一个简单的实例。 原理其实是利用fill-extrusion,将线加上缓冲区变成面,然后拉升面&am…

一、RocketMQ基本概述与部署
RocketMQ基本概述与安装 一、概述1.MQ概述1.1 用途1.2 常见MQ产品1.3 MQ常用的协议 2.RocketMQ概述2.1 发展历程 二、相关概念1.基本概念1.1 消息(Message)1.2 主题(Topic)1.3 标签(Tag)1.4 队列࿰…
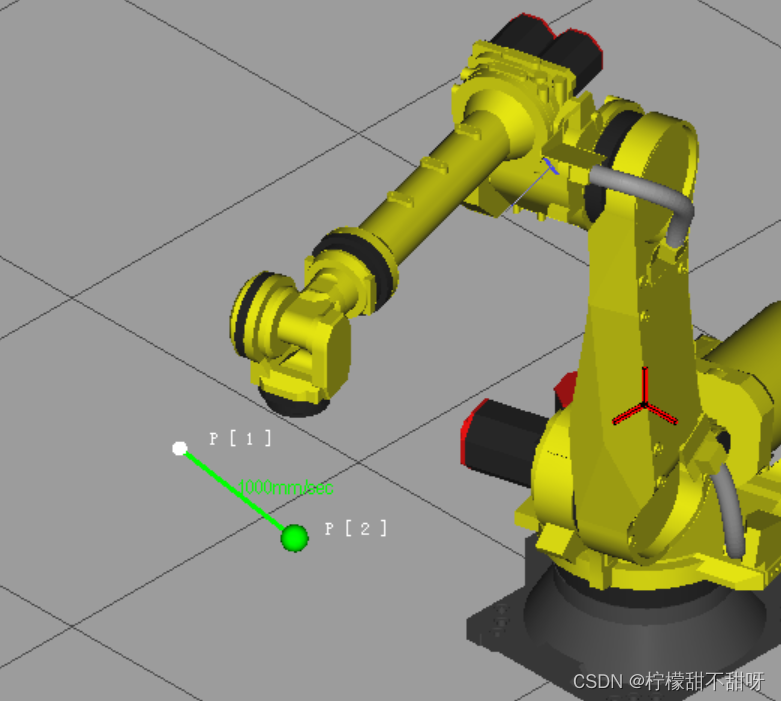
FANUC机器人工具坐标偏移的用法
一、工具坐标偏移的使用场景
在机器人位置不改变的情况下,工业机器人使用默认工具坐标系示教的一系列运动点位,要保持原本点位位置不变的情况下,改变机器人工具坐标的参数,就要用到机器人坐标转化的功能。在FANUC机器人上体现为机…

如何在Python中调用系统命令或执行外部程序?详细教程来了!
基本原理
在Python中执行程序或调用系统命令是一项非常实用的技能,这允许Python脚本与操作系统进行交互,执行各种外部程序。Python提供了多种方法来实现这一功能,包括os.system(), subprocess模块等。
示例代码
示例1:使用os.s…
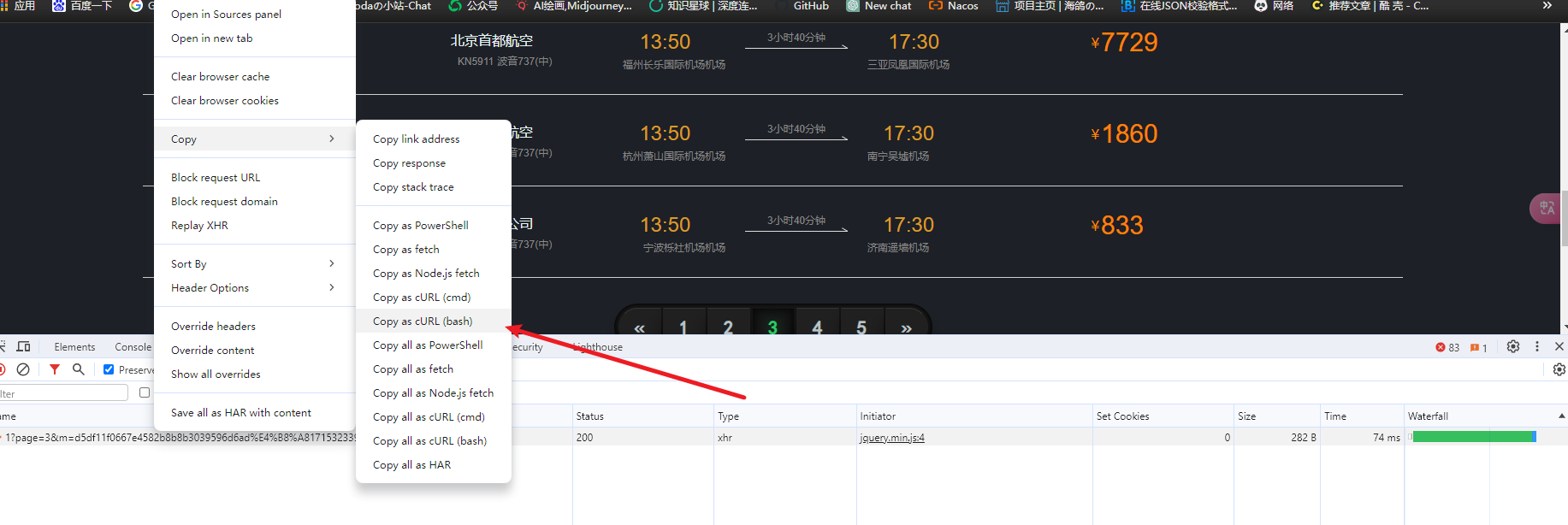
js逆向,参数加密js混淆
关键词 JS 混淆、源码乱码、参数动态加密 逆向目标 题目1:抓取所有(5页)机票的价格,并计算所有机票价格的平均值,填入答案。 目标网址:https://match.yuanrenxue.cn/match/1目标接口:https://ma…

Nachi那智不二越机器人维修技术合集
一、Nachi机械手维护基础知识 1. 定期检查:定期检查机器人的各个部件,如机械手伺服电机、机器人减速器、机械臂传感器等,确保其运行正常。 2. 清洁与润滑:定期清洁Nachi工业机器人表面和内部,并使用合适的润滑油进行润…
Burp Suite 抓包,浏览器提示有软件正在阻止Firefox安全地连接到此网站
问题现象
有软件正在阻止Firefox安全地连接到此网站 解决办法
没有安装证书,在浏览器里面安装bp的证书就可以了
参考:教程合集 《H01-启动和激活Burp.docx》——第5步
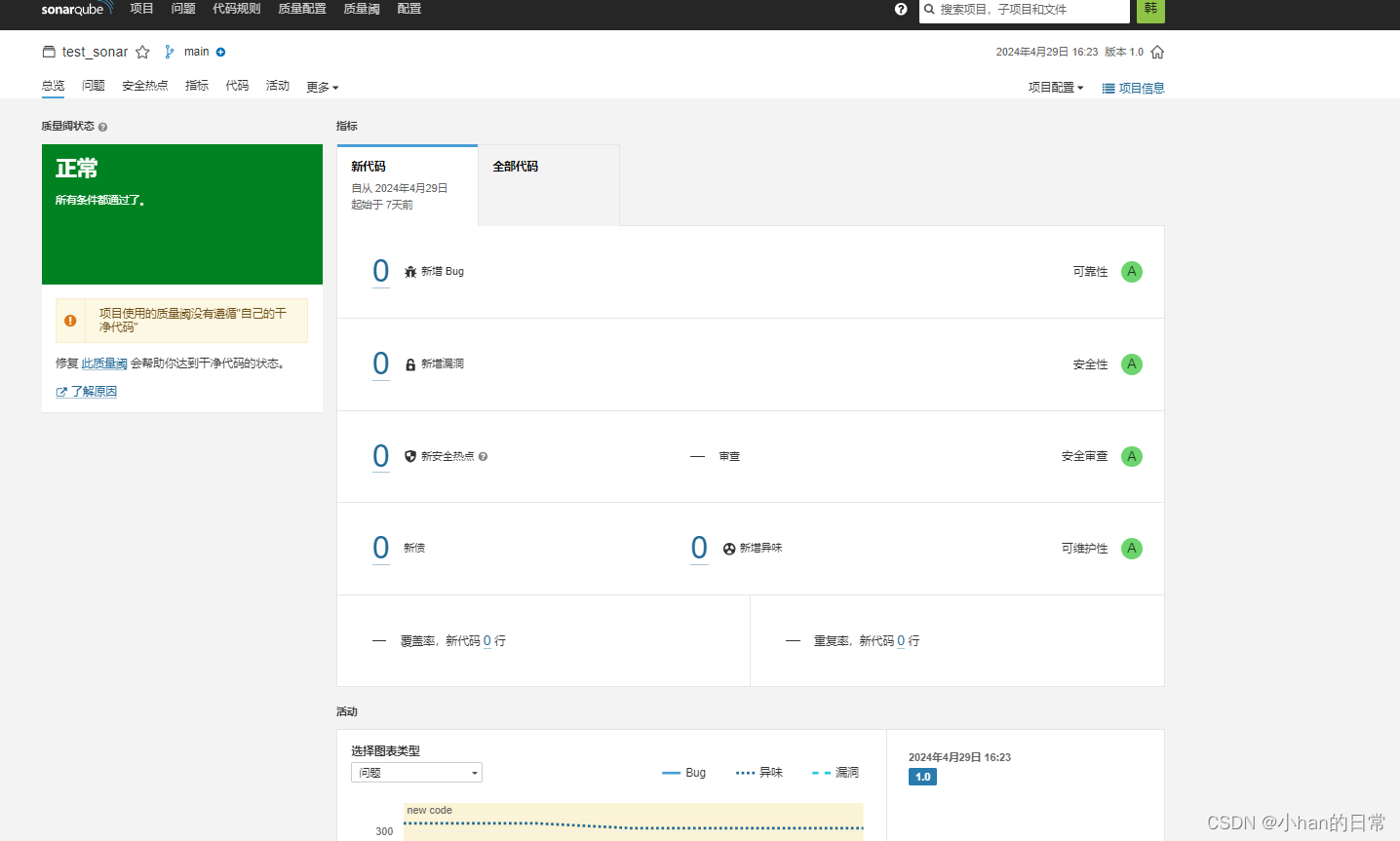
jenkins+gitlab+sonar自由风格项目配置
新建项目&基本配置 gitlab侧配置 sonar.projectKeytest_sonar
sonar.projectNametest_sonar
sonar.projectVersion1.0
sonar.sources.
sonar.exclusionssrc/layout/**
sonar.sourceEncodingUTF-8
sonar.nodejs.executable/app/nodejs/node-v16.20.2-linux-x64/bin/node配置…

华为OD机试 - 手机App防沉迷系统(Java 2024 C卷 100分)
华为OD机试 2024C卷题库疯狂收录中,刷题点这里 专栏导读
本专栏收录于《华为OD机试(JAVA)真题(A卷B卷C卷)》。
刷的越多,抽中的概率越大,每一题都有详细的答题思路、详细的代码注释、样例测试…

AutoDL服务器远程桌面
文章目录 1.安装VNC和必要的一些图形显式库:2.SSH隧道2.1.本地安装openssh服务器2.2.服务开启2.3.显示当前安装的 SSH 版本信息2.3.设置一个 SSH 隧道 注意3.VNC Viewer客户端登录4.测试5.参考 VNC(Virtual Network Computing )是一种图形化的桌面共享协…

05-树9 Huffman Codes
05-树9 Huffman Codes (30分)
题目描述 In 1953, David A. Huffman published his paper “A Method for the Construction of Minimum-Redundancy Codes”, and hence printed his name in the history of computer science. As a professor who gives…
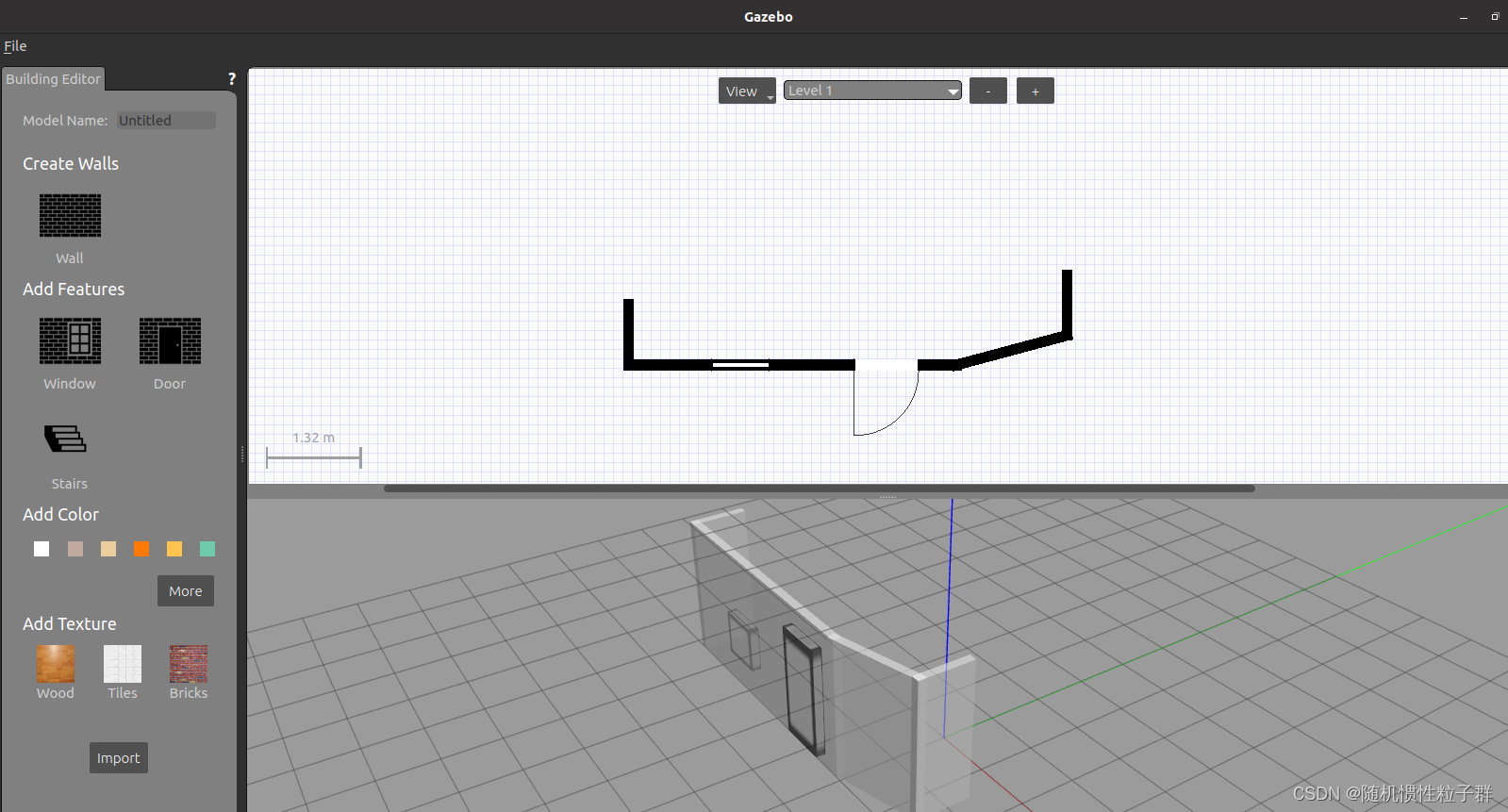
ROS机器人入门:机器人系统仿真【学习记录】——2
承接上一篇博客:
ROS机器人入门:机器人系统仿真【学习记录】——1-CSDN博客
我们先前结束了(上一篇博客中):
1. 概述
2. URDF集成Rviz基本流程
3. URDF语法详解
4. URDF优化_xacro
下面让我们继续学习ROS机器人…
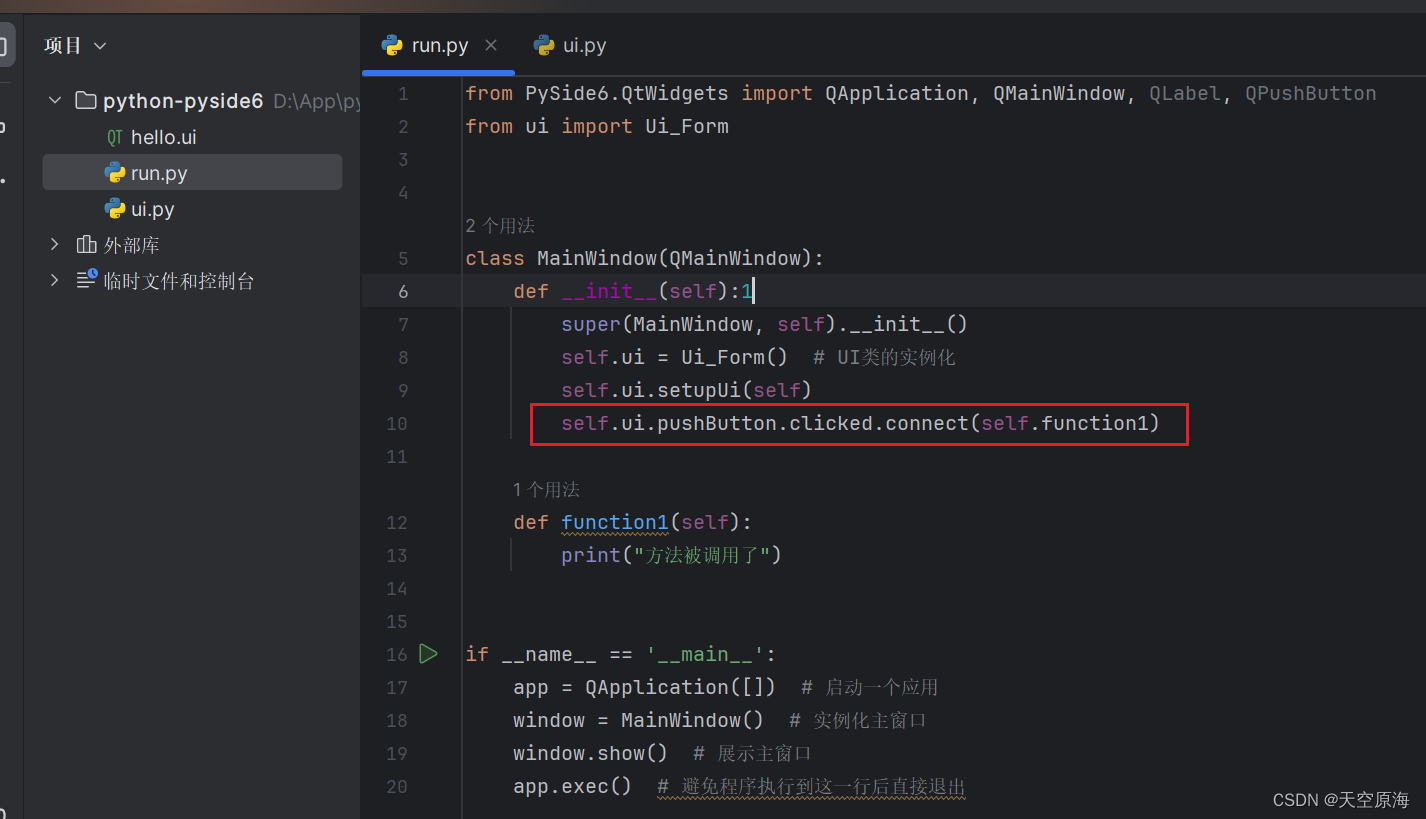
做一个属于自己的软件-pyside6快速上手教程
首先环境需要安装python3和pip,软件使用pycharm,安装也都很简单
首先需要安装pyside6,在终端执行:
pip install pyside6
然后进入可视化编辑界面
pyside6-designer
进入后创建即可 可以从左侧点击鼠标拉组件进入到中间的工作区ÿ…
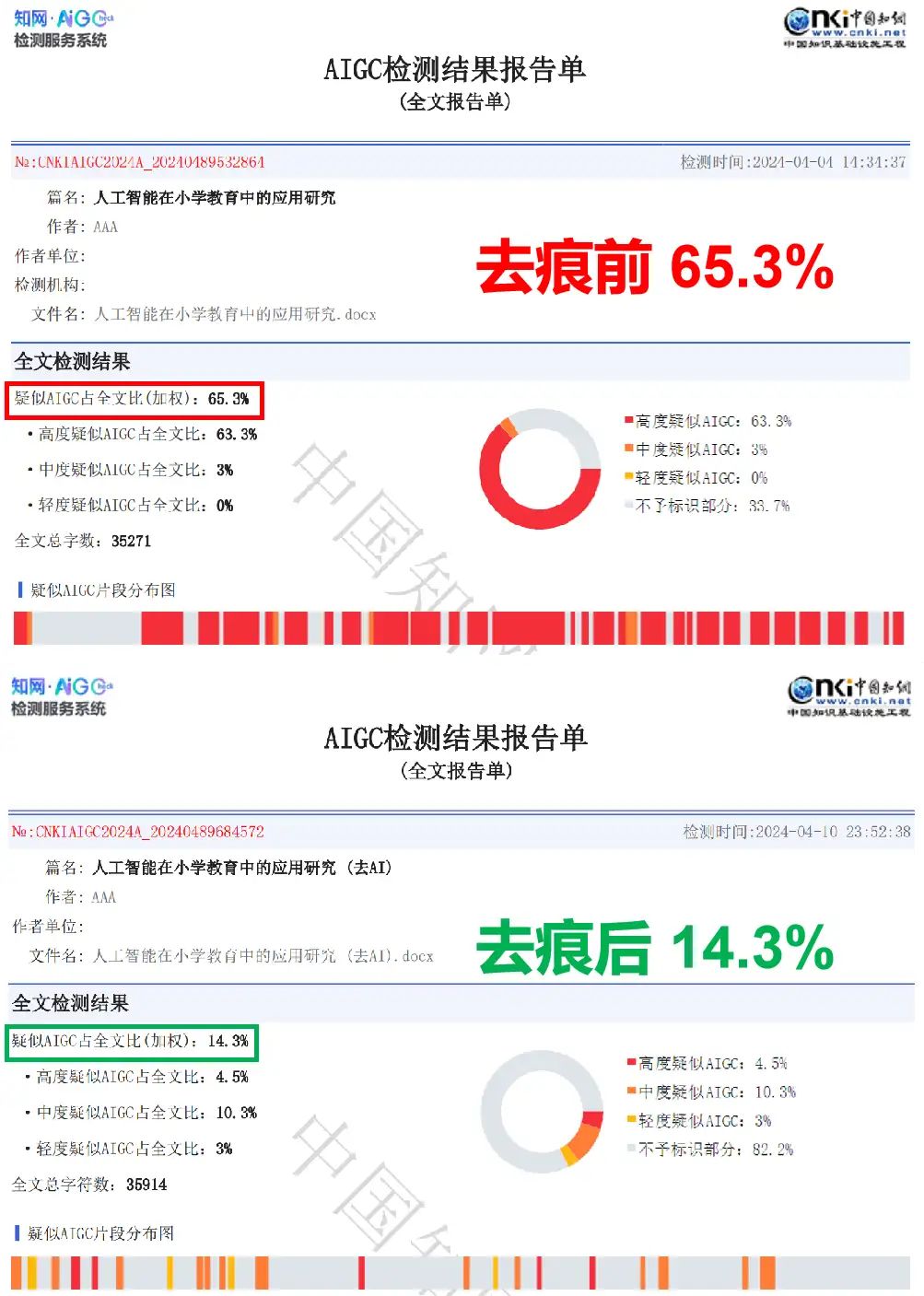
AI写的论文AI疑似度太高怎么办?教你一招解决
随着 AI 技术迅猛发展,各种AI辅助论文写作的工具层出不穷!
为了防止有人利用AI工具进行论文代写,在最新的学位法中已经明确规定“已经获得学位者,在获得该学位过程中如有人工智能代写等学术不端行为,经学位评定委员会…
分拣机器人也卷的飞起来了
导语 大家好,我是智能仓储物流技术研习社的社长,老K。专注分享智能仓储物流技术、智能制造等内容。 新书《智能物流系统构成与技术实践》 智能制造-话题精读 1、西门子、ABB、汇川:2024中国工业数字化自动化50强 2、完整拆解:智能…