本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/database/54695.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

STM32F407-02
STM32时钟体系
什么是晶振 晶振全称晶体振荡器 ,是晶体和电子元件组成,晶振有个非常重要的特性 机电效应(压电效应)
一般晶振会提供高度稳定的频率 震荡频率是固定的 一般晶振有8MHZ 12MHZ 25MHZ 晶振的单位是HZ(单位时间震荡的次数) 时钟源一共有5种
HSE(High Speed Exter…

基于对数变换的图像美白增强,Matlab实现
博主简介:matlab图像处理(QQ:3249726188)
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ 本次案例是基于对数变换的图像美白增强,用matlab实现。 一、案例背景和算法介绍 这次案例是美白算法&…
【路径规划】人工势场(APF)、涡旋APF、安全APF和动态窗口方法在航点跟踪问题的比较
摘要
本研究比较了几种路径规划算法在航路点跟踪中的性能,包括传统的人工势场算法(APF)、涡旋人工势场(VAPF)、安全人工势场(SAPF)和动态窗口方法(DWA)。实验结果表明&a…

战神诸神黄昏9月19日登录PC端! 手机怎么玩战神诸神黄昏
9月19日,《战神:诸神黄昏》正式登录PC端,这是一部动作冒险游戏。要是你想随时随地在手机或平板上也能玩《战神:诸神黄昏》,可以使用网易GameViewer远程帮你实现。 网易GameViewer远程作为一款专为游戏玩家打造的远程软…

基于yolov8的红外小目标无人机飞鸟检测系统python源码+onnx模型+评估指标曲线+精美GUI界面
【算法介绍】
基于YOLOv8的红外小目标无人机与飞鸟检测系统是一项集成了前沿技术的创新解决方案。该系统利用YOLOv8深度学习模型的强大目标检测能力,结合红外成像技术,实现了对小型无人机和飞鸟等低空飞行目标的快速、准确检测。
YOLOv8作为YOLO系列的…

继续毕设BESS代码详细理解
def NewProf(threshold, load_profile, target_battery, n): def CostCalc(load_profile,n): def batCapCalc(load_profile,target_thresh,n): 数学公式和流程图描述: def cyclesCalc(load_profile,new_profile,target_battery,n): plt.xlabel("Time Stamp(…

【云原生安全篇】一文掌握Harbor集成Trivy应用实践
【云原生安全篇】一文掌握Harbor集成Trivy应用实践
目录
1 概念 1.1 什么是 Harbor 和 Trivy? 1.1.1 Harbor 1.1.2 Trivy 1.2 Harbor 与 Trivy 的关系 Trivy 在 Harbor 中的作用: 1.3 镜像扫描工作流程 2 实战案例:在Harbor 配置 Trivy …

【MPC】无人机模型预测控制复现Data-Driven MPC for Quadrotors项目(Part 1)
无人机模型预测控制复现Data-Driven MPC for Quadrotors项目 参考链接背景和问题方法与贡献实验结果安装ROS创建工作空间下载RotorS仿真器源码和依赖创建Python虚拟环境下载data_driven_mpc仓库代码下载并配置ACADO求解器下载并配置ACADO求解器的Python接口下载并配置rpg_quadr…

Vue3 : Pinia的性质与作用
目录
一.性质
二.作用
三.Pinia 的核心概念
四.使用
1.count.ts
2.count.vue Vue 3 中 Pinia 是一个专为 Vue 3 设计的状态管理库,它旨在提供一种简单、直观的方式来管理应用的状态。
一.性质
1.集成性:Pinia 是 Vue 3 官方推荐的状态管理库&…

期权交易规则和操作方法分享!
今天带你了解期权交易规则和操作方法分享!期权交易涉及选择合适的合约、制定策略、下单交易和管理头寸。了解基础知识和市场动态是成功操作的关键。
50ETF期权交易规则
1、只能买入持仓量5000张以上的合约;2、期权到期日14:50开始会对实值合约进行强平,…

开源 AI 智能名片 S2B2C 商城小程序中的全渠道供应策略
摘要:本文深入探讨在开源 AI 智能名片 S2B2C 商城小程序的情境下,全渠道供应的运行机制。阐述各环节企业相互配合的重要性,重点分析零售企业在其中的关键作用,包括协调工作、信息传递、需求把握等方面,旨在实现高效的全…

codeup:将已有文件夹推送到已有仓库
codeup:将已有文件夹推送到已有仓库 总流程git initgit remote add origin https://codeup.aliyun.com/xxx/xxx.gitgit pull 远程库别名 mastergit add .git commit (会遇到很多问题)git push -u origin master (会遇到很多问题&a…
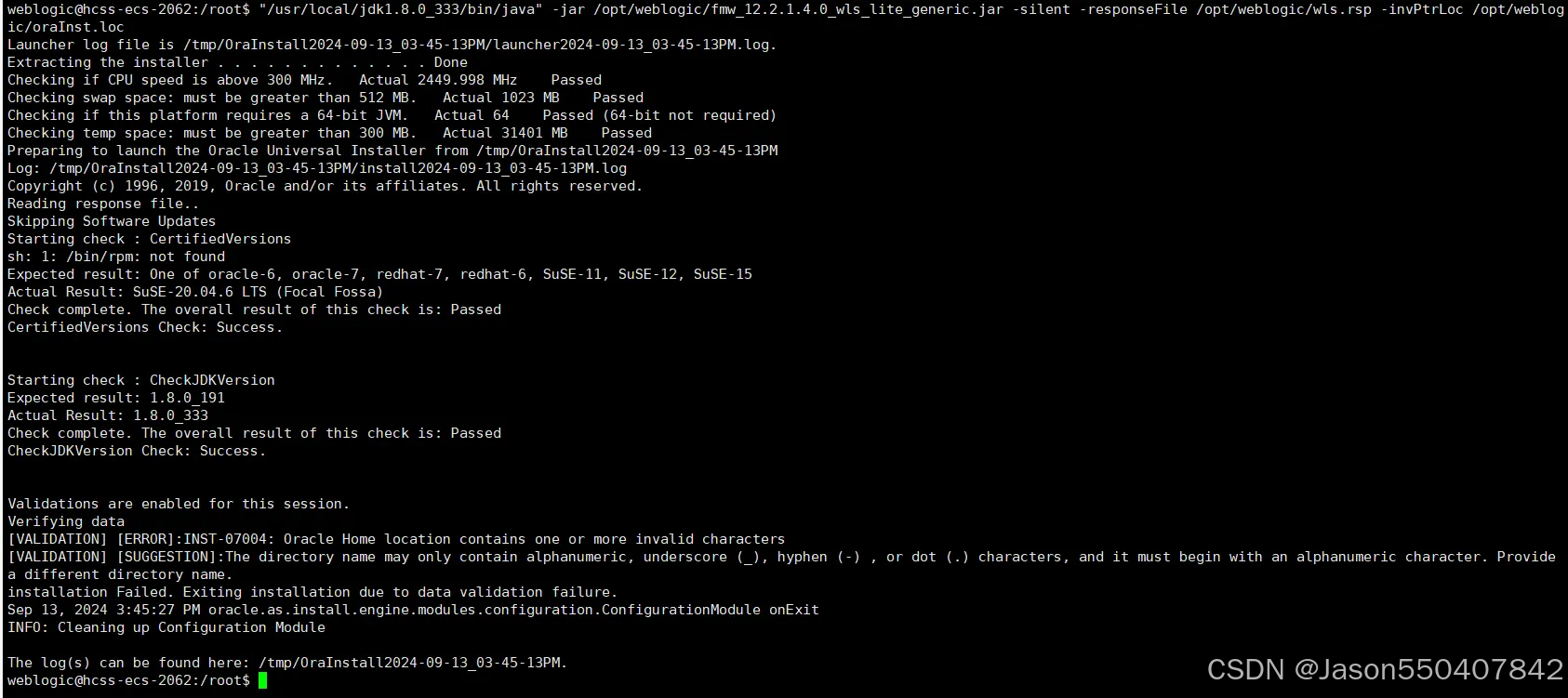
Weblogic部署
要安装weblogic,首先要有java环境,因此需要先安装jdk。
这里需要注意,weblogic版本不同,对应的jdk版本也不同,我在这里就踩了很多坑,我这里下载的是fmw_12.2.1.4.0_wls_lite_generic.jar对应的是jdk-8u333…

正则表达式匹配整数与浮点数失败与解决方案
正则表达式匹配整数与浮点数失败与解决方案 问题描述问题分析解决方案总结 问题描述
在处理数据的时候需要提取文本内整数与浮点数,这个时候想到使用正则表达式,咨询百度文心一言给出以下方案及参考代码
import re text "我有100元,…

linux概述与安装虚拟机
linux
1.Linux 概述
Linux 是一个极具影响力和广泛应用的操作系统。
它起源于芬兰人林纳斯・托瓦兹在大学期间编写的开源内核。Linux 作为一个整体,是免费供用户使用的,具备多用户、多任务、支持多线程的强大特性。
Linux 内核是其核心部分ÿ…

基于ssm的个性化影片推荐系统设计与实现
需要项目源码请联系我,目前有各类成品 毕设 javaweb ssh ssm springboot等等项目框架,源码丰富。
专业团队,咨询就送开题报告,活动限时免费,有需要的朋友可以来咨询。 一、摘要
随着科学技术的飞速发展,社…


QT 串口上位机读卡显示
目录
一. QT创建工程
二. 软件更换图标
三. QT打包 一. QT创建工程
文件新建,选择创建一个桌面QT。 重命名RFID,并选择工程保存路径 RFID.pro
QT core gui serialport
#串行串口greaterThan(QT_MAJOR_VERSION, 4): QT widgetsTARGET RFID
TE…

python怎么写csv文件
最常用的一种方法,利用pandas包。 import pandas as pd#任意的多组列表
a [1,2,3]
b [4,5,6] #字典中的key值即为csv中列名
dataframe pd.DataFrame({a_name:a,b_name:b})#将DataFrame存储为csv,index表示是否显示行名,defaultTrue
dataframe.to_c…
