本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/database/83980.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

解决python matplotlib画图无法显示中文的问题
在用matplotlib做一个简单的可视化统计时,由于标签是中文,无法显示,只是显示出来一些方框(如图) 问题在于,当前matplotlib使用的字体不支持中文,我们进行替换就可以了
我想替换为黑体ÿ…

分拣线番茄分级缺陷识别图像分割系统:创新探讨教学
分拣线番茄分级缺陷识别图像分割系统源码&数据集分享
[yolov8-seg-timm&yolov8-seg-dyhead-DCNV3等50全套改进创新点发刊_一键训练教程_Web前端展示]
1.研究背景与意义
项目参考ILSVRC ImageNet Large Scale Visual Recognition Challenge
项目来源A…
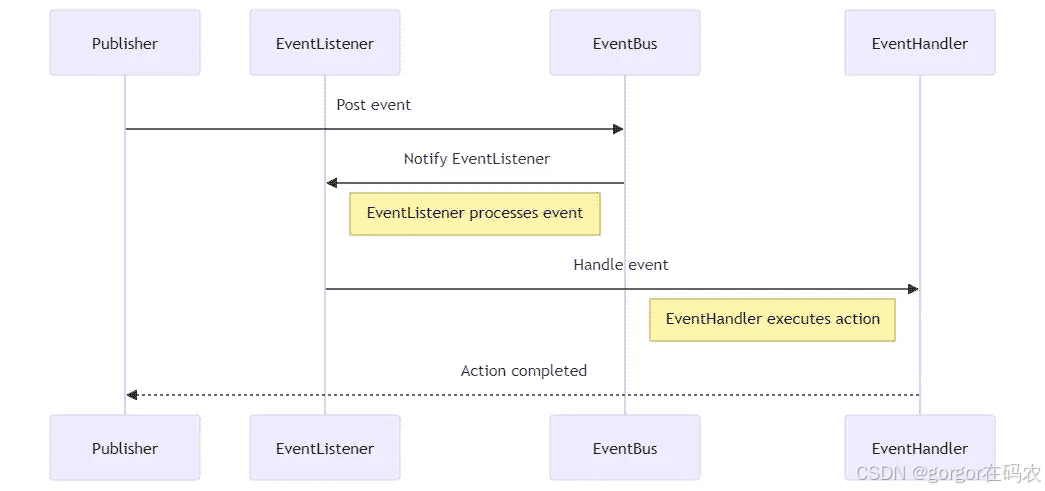
Google Guava 发布订阅模式/生产消费者模式 使用详情
目录 Guava 介绍
应用场景举例
1. 引入 Maven 依赖 2. 自定义 Event 事件类
3. 定义 EventListener 事件订阅者
4. 定义 EventBus 事件总线
5. 定义 Controller 进行测试 Guava 介绍 Guava 是一组来自 Google 的核心 Java 库,里面包括新的集合 类型(…

Pytest-Bdd-Playwright 系列教程(5):仅执行测试用例的收集阶段
Pytest-Bdd-Playwright 系列教程(5):仅执行测试用例的收集阶段 一、为什么需要仅收集测试用例二、应用场景三、方法详解【方法1】:添加pytest.ini文件的addopts配置项【方法2】:通过命令行参数运行 四、CI/CD 环境下的…

6. STM32之TIM实验--编码器接口()--(实验5:PWM驱动直流电机)
这篇文章是通用定时器的最后一章节,也就是编码器接口,主要是用来进行对精确测量旋转角度或速度的负载进行精确控制。
STM32 编码器模式详解-CSDN博客
STM32——编码器测速原理及STM32编码器模式_龙邱512编码器stm32历程-CSDN博客
推荐一款优秀的pdf编辑器:Ashampoo PDF Pro
Ashampoo PDF Pro是管理和编辑 PDF 文档的完整解决方案。程序拥有您创建、转换、编辑和保护文档所需的一切功能。根据需要可以创建特定大小的文档,跨设备可读,还可以保护文件。现在您还能像编辑Word文档一样编辑PDF! 软件特点
轻松处理文字
如 Microso…

如何统一netty版本
说明:项目中有引入netty各模块的依赖,有netty-common、netty-handler-proxy、netty-resolver-dns……是分别引入的,如下: 各模块的版本各不相同,想统一这些模块版本,可以在最外层的pom.xml里面,…

【LeetCode】每日一题 2024_11_3 大礼包(记忆化搜索)
前言
每天和你一起刷 LeetCode 每日一题~
LeetCode 启动! 题目:大礼包 代码与解题思路
先读题:
根据 needs 数组来买对应商品的对应数量;price 数组表示对应商品的零售价;而 special 中的每一个数组代表一个礼包&a…

项目实战:基于Linux的Flappy bird游戏开发
一、项目介绍
项目总结 1.按下空格键小鸟上升,不按小鸟下落 2.搭建小鸟需要穿过的管道 3.管道自动左移和创建 4.小鸟撞到管道游戏结束
知识储备 1.C语言 2.数据结构-链表 3.Ncurses库 4.信号机制 二、Ncurses库介绍 Ncurses是最早的System V Release 4.0 (SVr4)中…

Unity 2D寻路导航 NavMeshPlus解决方案
插件的github主页 h8man/NavMeshPlus: Unity NavMesh 2D Pathfinding 这个插件是基于新版3D寻路导航制作的,所以你可能需要看一下这篇文章 新旧Navmash 寻路导航组件对比 附使用案例与实用教程链接-CSDN博客 这行代码agent.updateUpAxis false 一定要为代理单位…

清华双臂机器人扩散大模型RDT:先预训练后微调,支持语言、图像、动作多种输入
前言
通过上文介绍的GR2,我们看到了视频生成模型在机器人训练中的应用,无独有偶,和GR2差不多一个时期出来的清华RDT,其模型架构便基于视频生成架构DiT改造而成(当然,该清华团队其实也在DiT之前推出了U-ViT,…
日常物品图像分割系统:新手入门宝典
日常物品图像分割系统源码&数据集分享
[yolov8-seg-C2f-DAttention&yolov8-seg-AIFI等50全套改进创新点发刊_一键训练教程_Web前端展示]
1.研究背景与意义
项目参考ILSVRC ImageNet Large Scale Visual Recognition Challenge
项目来源AAAI Global A…

若依系统前端项目解读——从使用过程解读
登录系统 用户初次登录,浏览器中未存用户信息(token),需向后端请求并保存至浏览器中用户再次登录系统,向后端发请求会携带token在请求头中,并与后端Redis缓存的token比较,判断token是否还在有效…

计算机视觉实验一:图像基础处理
1. 图像的直方图均衡
1.1 实验目的与要求
(1)理解直方图均衡的原理与作用;
(2)掌握统计图像直方图的方法;
(3)掌握图像直方图均衡的方法。 1.2 实验原理及知识点 直方图均衡化是通过灰度变换将一幅图象转换为另一幅均衡直方图,即在每个灰度级上都具有相同的象素…

LeetCode25:K个一组翻转链表
原题地址:. - 力扣(LeetCode) 题目描述 给你链表的头节点 head ,每 k 个节点一组进行翻转,请你返回修改后的链表。 k 是一个正整数,它的值小于或等于链表的长度。如果节点总数不是 k 的整数倍,那…

基于Python的A*算法实现路径规划
目录
一、A*算法
二、算法具体步骤
三、算法基本程序流程
四、算法代码实现
五、运行结果 一、A*算法
A*(A-Star)算法是P.E.Hart、N.J.Nilsson和B.Raphael等人在1986年综合Dijkstra算法和BFS算法的优点而提出来的一种非常有效的启发式路径搜索算法…

3. keil + vscode 进行stm32协同开发
1. 为什么使用vscode
主要还是界面友好,使用习惯问题,vscode 从前端,js, c/c, qt, 仓颉,rust都有很好插件的支持,并且有romote, wsl 等很多插件可以提高效率, 唯一的问题就是要使用插件进行环境…

到底是谁在初始化内存?—揭开处理器启动过程的奥秘
引言
在嵌入式系统和处理器架构的世界中,内存初始化过程就像一场舞台上的神秘表演。我们知道处理器依赖内存运行应用程序,但它最初如何实现内存的自我启动?在设备开机的那一刻,处理器如何有序地将启动加载程序(Bootlo…
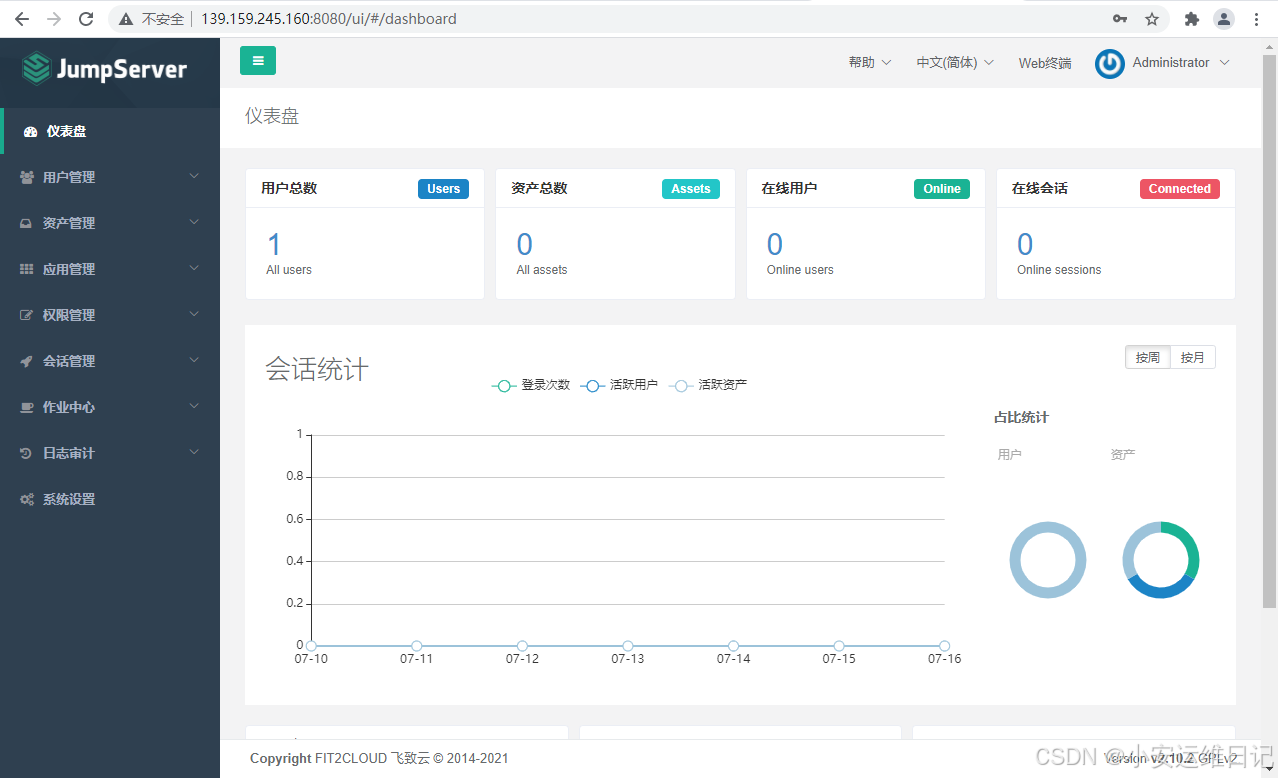
Linux云计算 |【第五阶段】PROJECT3-DAY1
主要内容:
跳板机(堡垒机)的概念、部署JumpeServer 一、跳板机(堡垒机)的概念
跳板机(Jump Server 或 Bastion Host)是一种网络安全设备或服务器,也称堡垒机,是一类可作…
