本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/136711.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

实战案例:如何批量查询物流信息并将结果导出到表格?
在现代社会中,快递已经成为人们生活中不可或缺的一部分。然而,当我们需要查询多个快递单号的物流信息时,手动一个一个输入并查询实在是太过繁琐。那么,有没有一种方法可以批量查询快递单号并快速导出物流信息呢?让我们…

Docker 容器技术 (上) 环境安装和部署、容器镜像、使用IDEA构建Springboot程序镜像、远程仓库、容器网络管理
Docker容器技术 文章目录 Docker容器技术容器技术入门环境安装和部署从虚拟机到容器容器工作机制简述 容器与镜像初识容器镜像镜像结构介绍构建镜像发布镜像到远程仓库实战:使用IDEA构建SpringBoot程序镜像 容器网络管理容器网络类型用户自定义网络容器间网络容器外…
《湖科大教书匠计算机网络》学习笔记总目录+思维导图
本篇文章是对《湖科大教书匠计算机网络》所有知识点的笔记总结归档和计算机网络的思维导图
学习视频:计算机网络微课堂(湖科大教书匠)
pdf百度云地址:pdf文档 提取码:yw4y
思维导图 各章节链接
第1章(…
Cannot download sources
问题
Swagger的相关包,没法看到注释;源码也下载不了,会报下面的错误。
解决办法是,通过maven,重新下载jar包。
报错 Cannot download sources Sources not found for: io.swagger.core.v3:swagger-annotations:2.2.…
Jetsonnano B01 笔记8:屏幕分辨率的调整
最近我的jetson 被学弟借用学习了一阵子,他在一顿捯饬后,成功将我的屏幕分辨率改成了一个阴间的水平,十分影响操作学习。 终端命令更改分辨率:
我们可以打开终端,输入以下命令来更改分辨率,但这样做有一个…
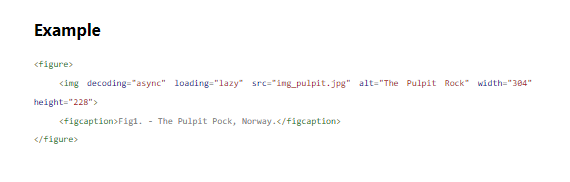
HTML5语义化标签解释说明
语义化:在HTML5中提供了一些,具备语义化的标签!他们通常用于去构造网页的各个部分!
HTML5之前网页的组成和布局通常是使用p和SPAN来构建和布局整个网页的,这样做是常见的做法,但存在一个问题,以…

家装小贴士!洗手台的位置该如何摆放?福州中宅装饰,福州装修
关于洗手台咱们常见的操作就是放在卫生间。
但你有没有想过挪出来? 洗手台挪出卫生间其实更便利,每天早上洗漱和蹲马桶就不会相互冲突,节约了很多等待时间;
同时卫生间也能省出更多空间做干湿分离。 1、洗手台挪出卫生间放哪儿&…
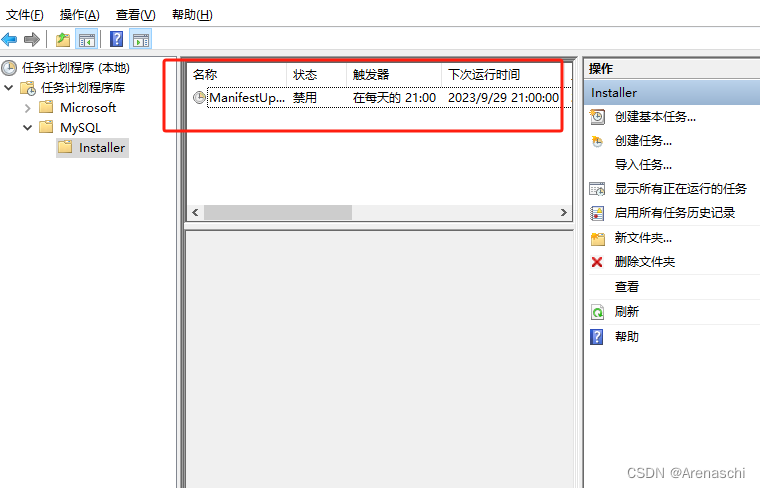
MySQL Installer is running in Community mode
每天很准时的弹出: 这是由于检查MySql并且更新的一个定时任务,没有更新成功导致
解决办法:禁用定时任务
1.先关闭错误框
2.打开控制面板 ,使用小图标查看 3. 打开管理工具,双击打开任务计划程序 4.双击进入…
26272-2010 地面数字电视调谐器基本性能要求和测量方法.
声明
本文是学习GB-T 26272-2010 地面数字电视调谐器基本性能要求和测量方法. 而整理的学习笔记,分享出来希望更多人受益,如果存在侵权请及时联系我们
1 范围
本标准规定了地面数字电视接收设备用特高频/超高频(VHF/UHF) 电子式调谐器基本性能要求
和测量方法。
本标准适用…
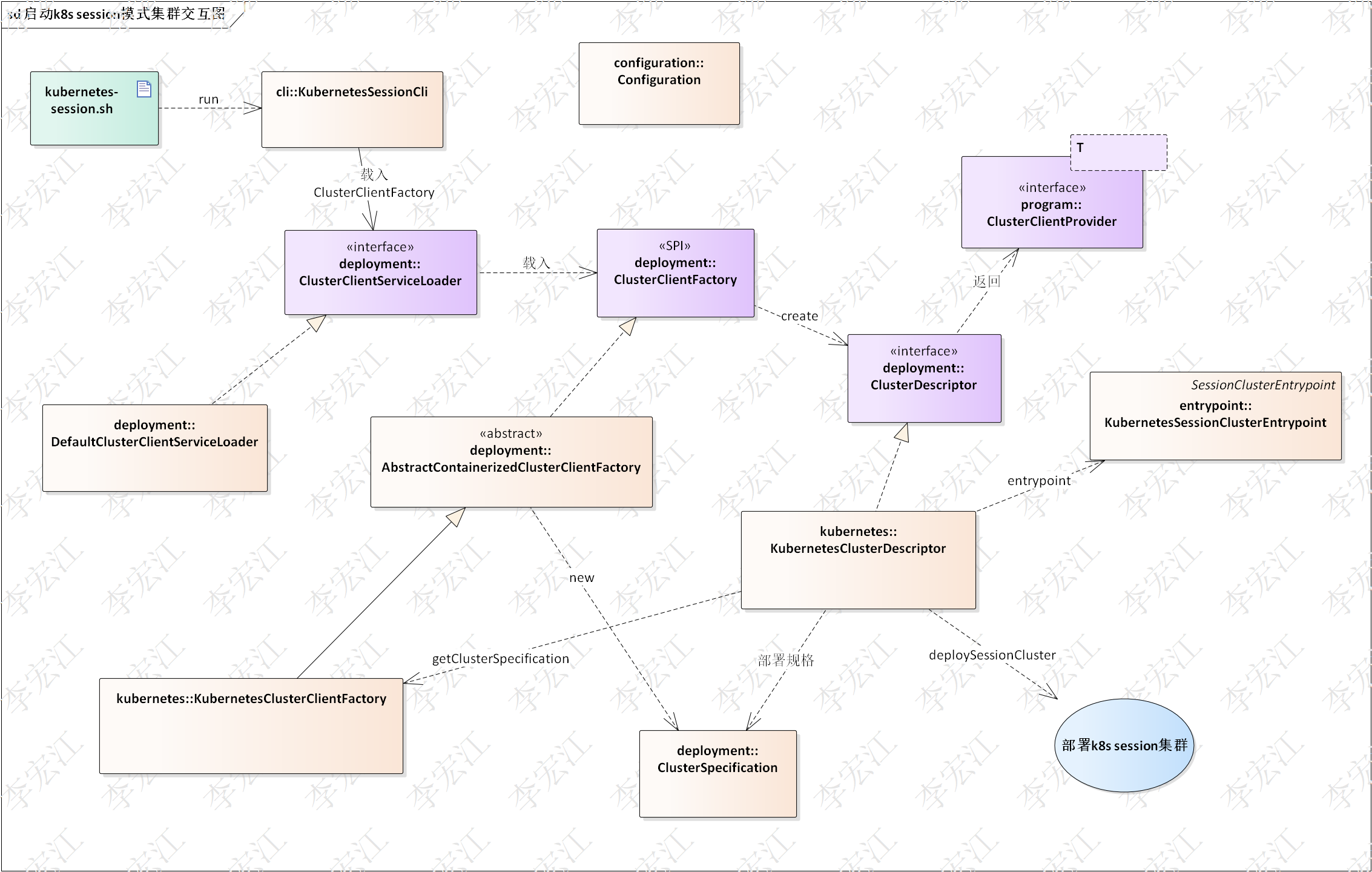
flink集群与资源@k8s源码分析-集群
0 介绍
本文是flink集群与资源@k8s源码分析系列的第二篇-集群
1 场景 下面详细分析各用例
2 启动k8s集群
k8s集群支持session和application模式,job模式将会被废弃,本文分析session模式集群 Configuration作为配置容器,几乎所有的构建需要从配置类获取配置项,这里不显示…

(vue3)create-vue 组合式API
优势:
更易维护:组合式api,更好的TS支持
之前是选项式api,现在是组合式,把同功能的api集合式管理
复用功能封装成一整个函数
更快的速度
更小的体积
更优的数据响应式:Proxy
create-vue 新的脚手架工…
【每日一题】花期内花的数目+【差分数组】+【二分枚举】
文章目录 Tag题目来源题目解读解题思路方法一:差分数组方法二:二分查找 写在最后 Tag
【差分数组】【二分查找】【数组】【2023-09-28】 题目来源
2251. 花期内花的数目 题目解读
每朵花都有自己的花期,有些花的花期会有重叠,也…
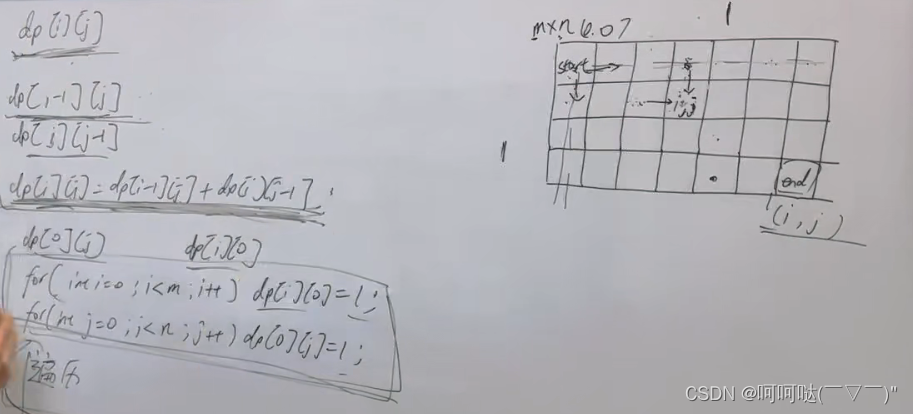
leetCode 62.不同路径 动态规划 + 空间复杂度优化
62. 不同路径 - 力扣(LeetCode)
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” …

Shiro高级及SaaS-HRM的认证授权
Shiro在SpringBoot工程的应用
Apache Shiro是一个功能强大、灵活的,开源的安全框架。它可以干净利落地处理身份验证、授权、企业会话管理和加密。越来越多的企业使用Shiro作为项目的安全框架,保证项目的平稳运行。
在之前的讲解中只是单独的使用shiro&…

python监控ES索引数量变化
文章目录 1, datafram根据相同的key聚合2, 数据合并:获取采集10,20,30分钟es索引数据脚本测试验证 1, datafram根据相同的key聚合
# 创建df1 > json {key:A, value:1 } {key:B, value:2 }
data1 {key: [A, B],
value: [1, 2]}
df1 pd.DataFrame(data1)# 创建d…

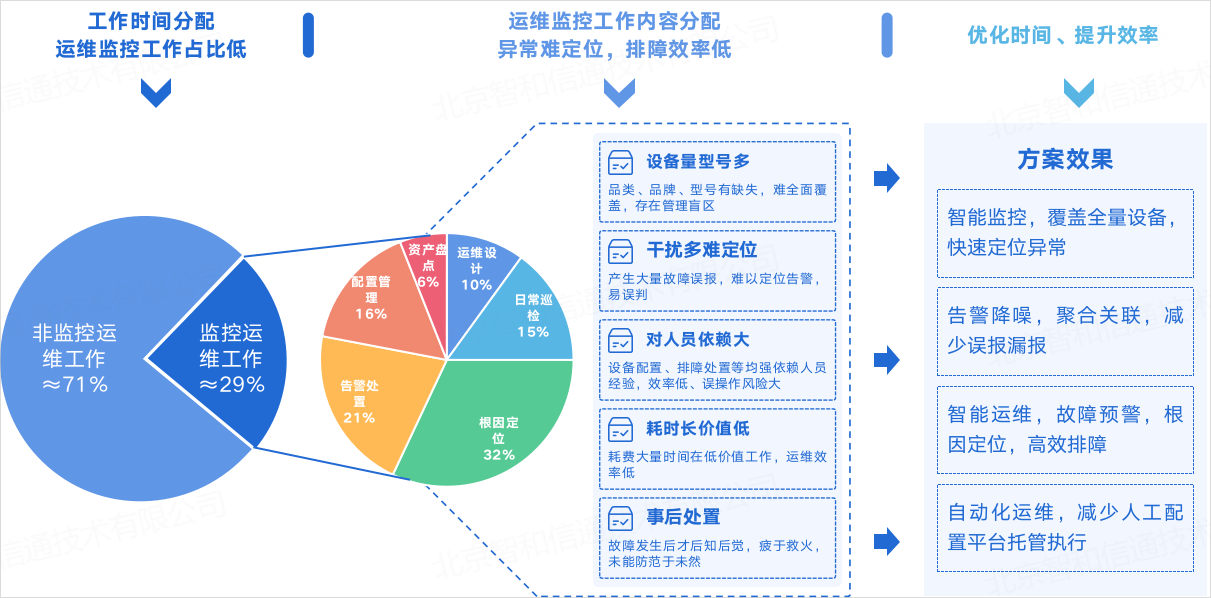
基于AIOps实现智慧园区极简IT运维
随着物联网、云平台、大数据、人工智能等技术的发展,并逐步投入到智慧园区的建设,传统园区数字化转型加快。园区的形式包括产业园区、教育园区、制造业园区、科研园区、社区等等,园区形态不断演进和发展,园区网承载的对象和业务也…
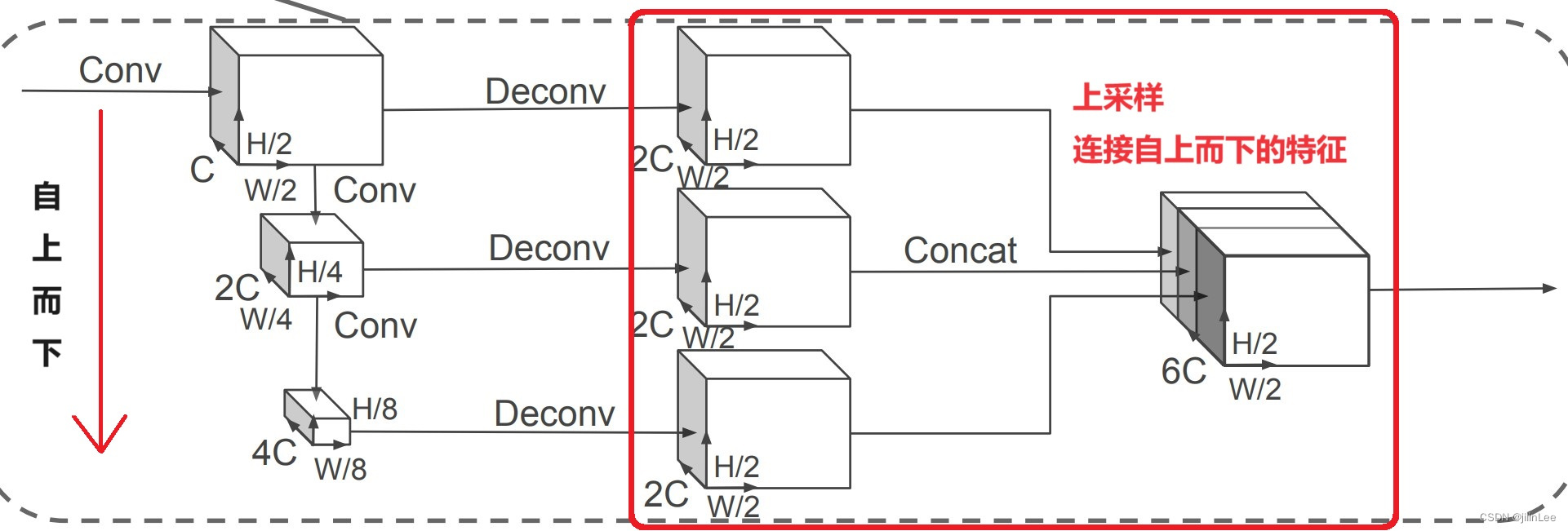
太实用了! 20分钟彻底理解【Pointpillars论文】,妥妥的!
PointPillars: Fast Encoders for Object Detection from Point Clouds
PointPillars:快就对了
摘要(可跳过):
这帮人提出了PointPillars,一种新颖的编码器,它利用PointNets来学习以垂直列组织的点云&am…
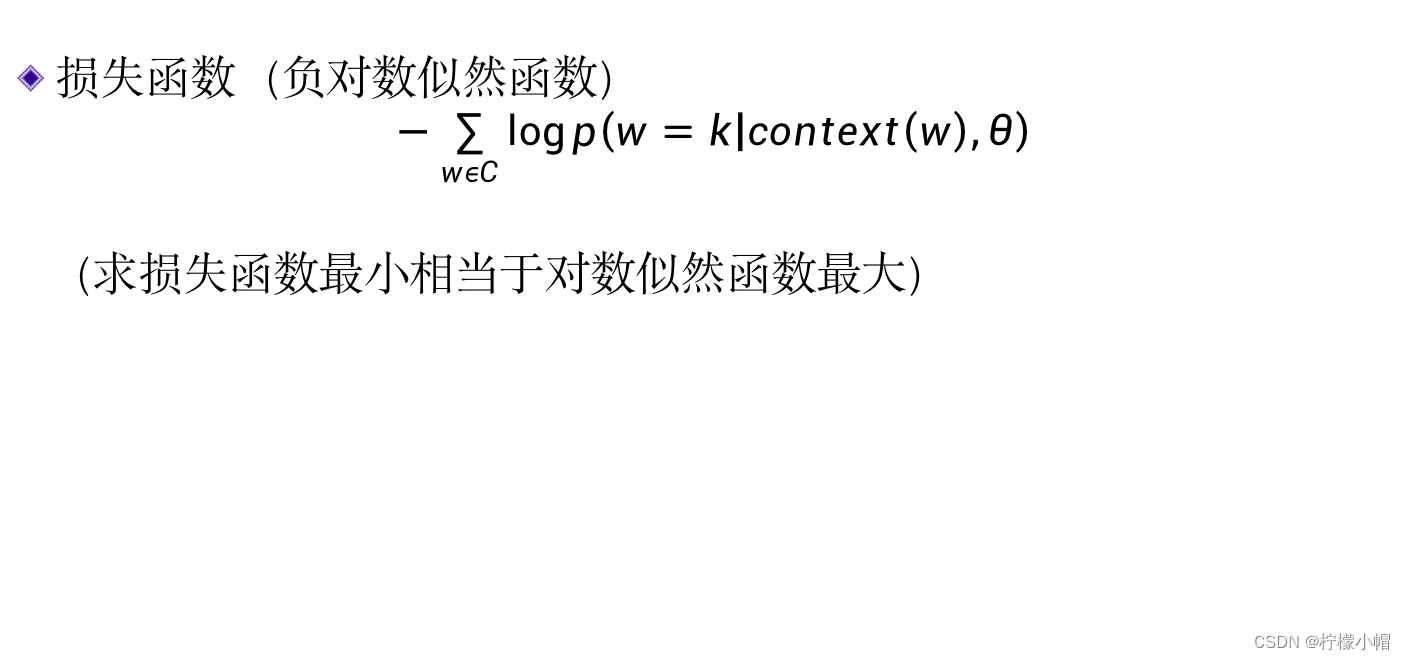
人工智能AI 全栈体系(七)
第一章 神经网络是如何实现的
神经网络不仅仅可以处理图像,同样也可以处理文本。由于处理图像讲起来比较形象,更容易理解,所以基本是以图像处理为例讲解的。
七、词向量 图像处理之所以讲起来比较形象,是因为图像的基本元素是像…

RISC-V 基础指令汇总
加载指令 存储指令 PC寻址指令
auipc rd, imm这条指令把 imm (立即数)左移12位并带符号扩展到64位后,得到一个新的立即数,这个新的立即数是一个有符号的立即数,再加上当前 PC 值,然后存储到 rd 寄存器中。…