本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/369580.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

0201安装报错-hbase-大数据学习
1 基础环境简介
linux系统:centos,前置安装:jdk、hadoop、zookeeper,版本如下
软件版本描述centos7linux系统发行版jdk1.8java开发工具集hadoop2.10.0大数据生态基础组件zookeeper3.5.7分布式应用程序协调服务hbase2.4.11分布式…
七彩虹@电脑cpu频率上不去问题@控制中心性能模式cpu频率上不去@代理服务器超时@账户同步设置失败
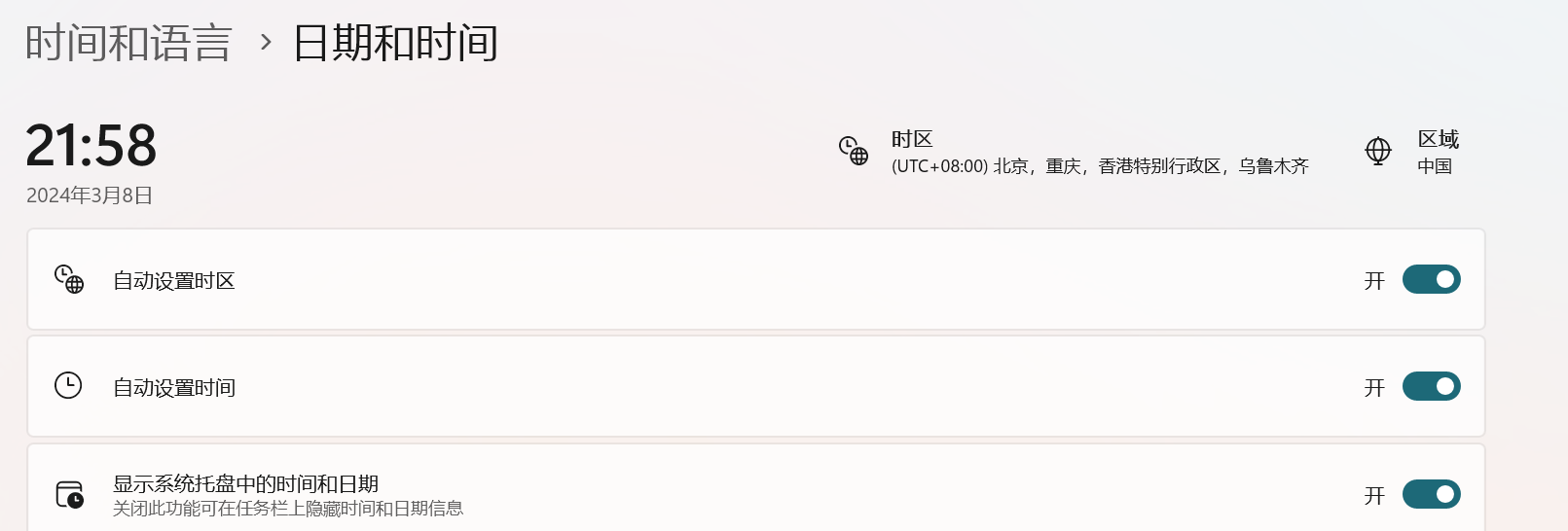
文章目录 windows电脑cpu频率上不去新电脑的系统时间问题系统时间不准造成的具体问题举例代理超时vscode同步请求失败自动校准时间 windows电脑cpu频率上不去
问题描述,标压处理器的笔记本,cpu频率上不去 如果cpu没问题的话,就应该是系统限制了功耗导致的有的笔记本有控制中心…

力扣hot100:240.搜索二维矩阵II(脑子)
吉大21级算法分析与设计的一道大题,由于每一行都是排好序的直接逐行二分 可以达到:O(mlogn)。但是这里追求更广的思路可以使用其他方法。 矩阵四分: 在矩阵中用中心点比较,如果target大于中心点的值,则由于升序排列&am…
Mysql中的MVCC
”真正学会,如你般自由~“ MVCC机制简介 MVCC(Multi-Version-Concurrency-Control)多版本并发控制,MVCC 是一种并发控制的方法,一般在数据库管理系统中,实现对数据库的并发访问;在编程中实现事务内存。 取自 MVCC存在被…
![寻找两个正序数组的中位数[困难]](https://img-blog.csdnimg.cn/direct/b120198f26d8457c8da11e00c4382c54.jpeg)
寻找两个正序数组的中位数[困难]
优质博文IT-BLOG-CN 一、题目
给定两个大小分别为m和n的正序(从小到大)数组nums1和nums2。请你找出并返回这两个正序数组的 中位数 。
算法的时间复杂度应该为O(log (mn)) 。
示例 1: 输入:nums1 [1,3], nums2 [2] 输出&…
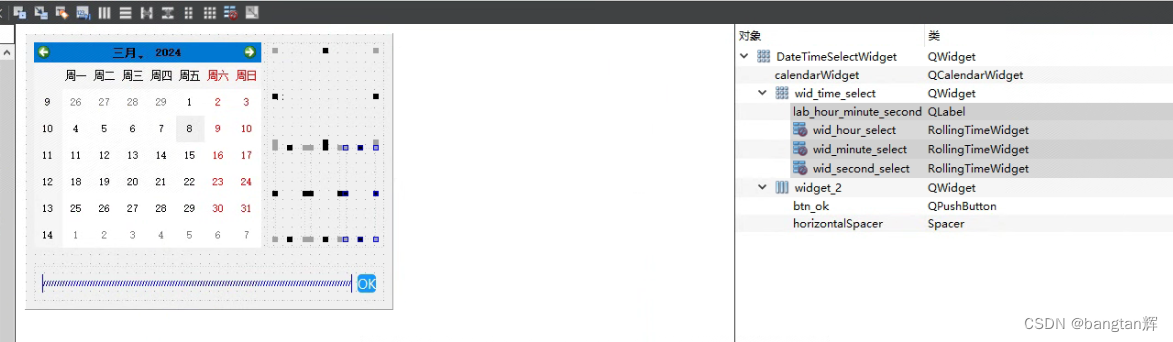
qt自定义时间选择控件窗口
效果如图: 布局如图: 参考代码:
//DateTimeSelectWidget
#ifndef DATETIMESELECTWIDGET_H
#define DATETIMESELECTWIDGET_H#include <QWidget>
#include <QDateTime>namespace Ui {
class DateTimeSelectWidget;
}class DateTim…

数据结构——lesson7二叉树 堆的介绍与实现
前言💞💞
啦啦啦~这里是土土数据结构学习笔记🥳🥳 💥个人主页:大耳朵土土垚的博客 💥 所属专栏:数据结构学习笔记 💥对于数据结构顺序表链表有疑问的都可以在上面数据结…
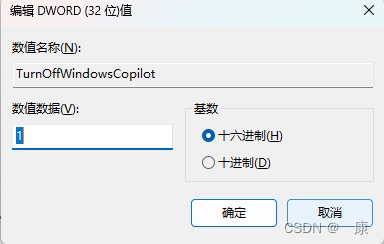
windows关闭copilot预览版
如果用户不想在windows系统当中启用Copilot,可以通过以下三种方式禁用。 第一种:隐藏Copilot 按钮
右键点击任务栏,取消勾选“显示 Copilot(预览版)按钮”,任务栏则不再显示,用户可以通过快捷键…

C++:模版进阶 | Priority_queue的模拟实现
创作不易,感谢三连支持
一、非类型模版参数
模板参数分类为类型形参与非类型形参。
类型形参即:出现在模板参数列表中,跟在class或者typename之类的参数类型名称。
非类型形参,就是用一个常量作为类(函数)模板的一个参数&…
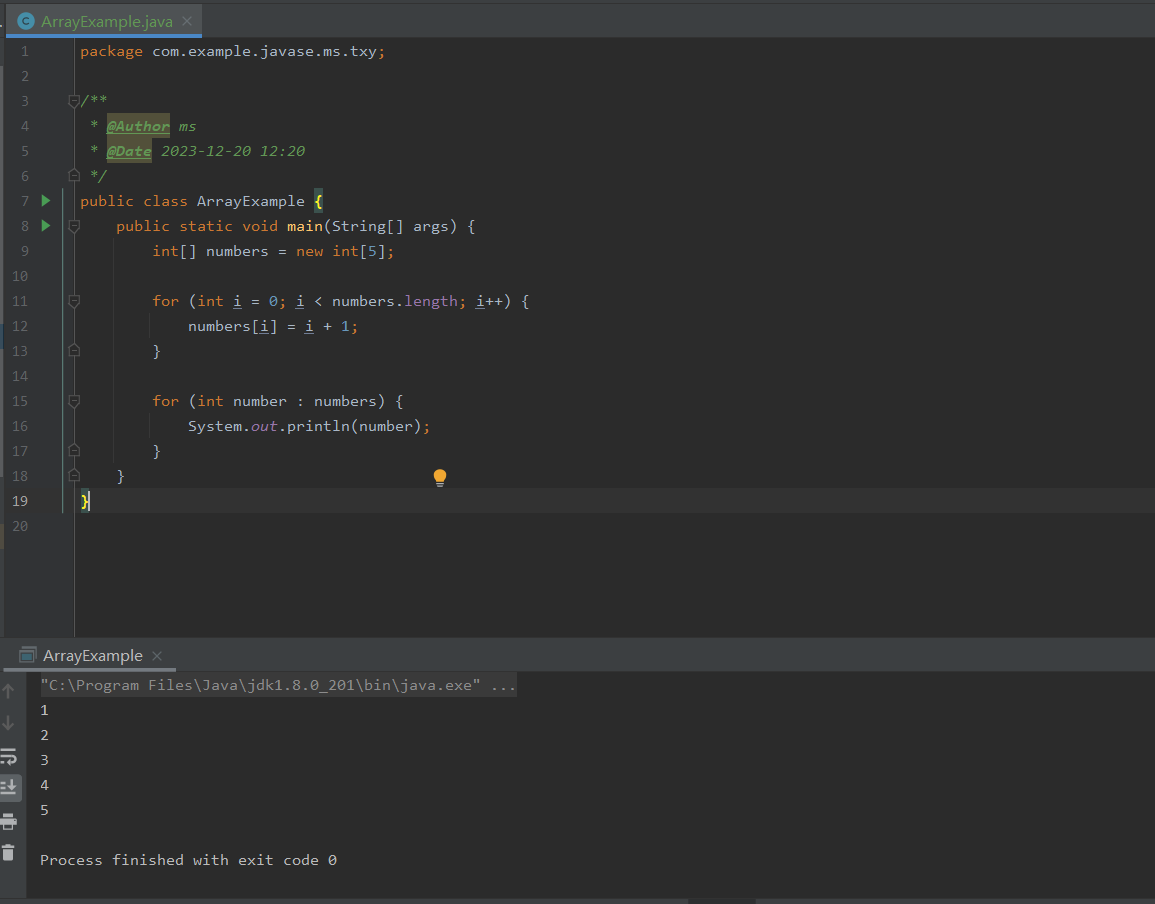
Java零基础 - 数组的定义和声明
哈喽,各位小伙伴们,你们好呀,我是喵手。 今天我要给大家分享一些自己日常学习到的一些知识点,并以文字的形式跟大家一起交流,互相学习,一个人虽可以走的更快,但一群人可以走的更远。 我是一名后…

深度学习与人类的智能交互:迈向自然与高效的人机新纪元
引言
随着科技的飞速发展,深度学习作为人工智能领域的一颗璀璨明珠,正日益展现出其在模拟人类认知和感知过程中的强大能力。本文旨在探讨深度学习如何日益逼近人类智能的边界,并通过模拟人类的感知系统,使机器能更深入地理解和解…
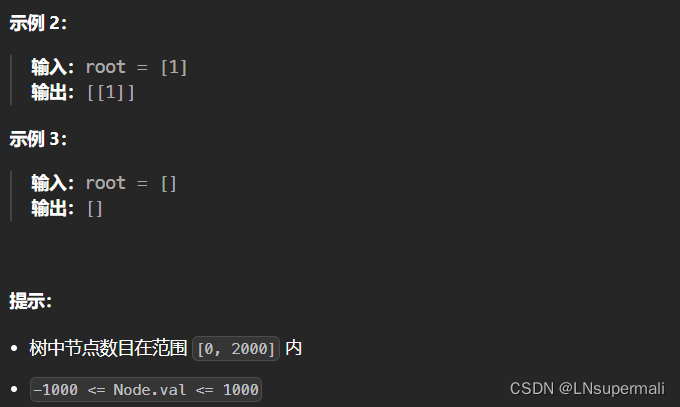
力扣102. 二叉树的层序遍历
Problem: 102. 二叉树的层序遍历 文章目录 题目描述思路复杂度Code 题目描述 思路 直接套用树的层序遍历模板,同时将每一层的节点存入一个数组中,并将其存入最终的二维结果数组中 复杂度
时间复杂度: O ( n ) O(n) O(n);其中 n n n为树节点的…

植物病害识别:YOLO甘蔗叶片病害识别分类数据集
YOLO甘蔗叶片病害识别数据集, 包含尾孢菌叶斑病,眼斑病,健康,红腐病,锈病,黄叶病6个常见病类别,3300多张图像,yolo标注完整,全部原始图像,未应用增强。 适用于CV项目&…

selenium高级应用
常见控件应用 复杂的控件操作1.操作Ajax选项2.滑动滑块操作 WebDriver的特殊操作元素class值包含空格property、attribute、text的区别定位动态id 截图功能页面截图页面截图,返回截图的二进制数据页面截图,返回base64的字符串截取指定元素。先定位元素&a…
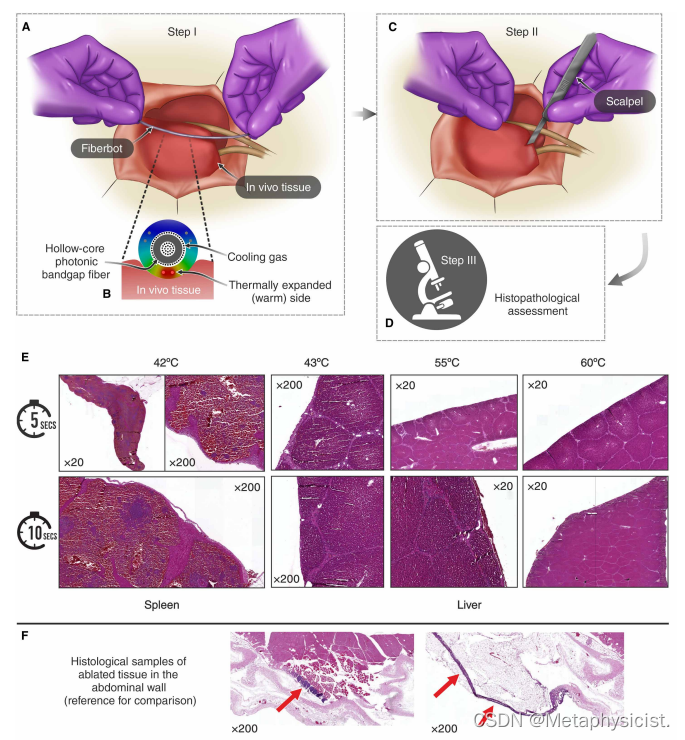
文献学习-14-一种用于高精度微创手术的纤维机器人
Authors: Mohamed E. M. K. Abdelaziz1,2 †, Jinshi Zhao1,3 †, Bruno Gil Rosa1,2 , Hyun-Taek Lee4 , Daniel Simon3,5 , Khushi Vyas1,2 , Bing Li6,7 , Hanifa Koguna3 , Yue Li1 , Ali Anil Demircali3 , Huseyin Uvet8 , Gulsum Gencoglan9,10, Arzu Akcay11,12, Moham…
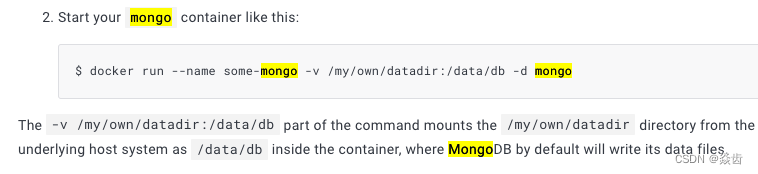
docker学习入门
1、docker简介
docker官网: www.docker.com dockerhub官网: hub.docker.com
docker文档官网:docs.docker.com
Docker是基于Go语言实现的云开源项目。
Docker的主要目标是:Build, Ship and Run Any App, Anywhere(构建&…
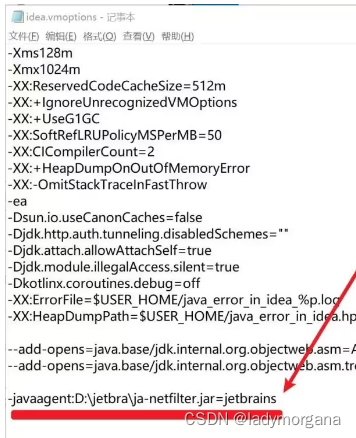
2024 RubyMine 激活,分享几个RubyMine 激活的方案
文章目录 RubyMine 公司简介我这边使用RubyMine 的理由RubyMine 2023.3 最新变化AI Assistant 正式版对 AI 生成名称建议的支持改进了 Ruby 上下文单元测试生成 RailsRails 应用程序和引擎的自定义路径Rails 路径的自动导入对存储在默认位置之外的模型、控制器和邮件器的代码洞…

部署 LVS(nginx)+keepalived高可用负载均衡集群
目录
一、集群的概述
1、什么是集群
2、普通集群与负载均衡集群
2.1 普通集群(Regular Cluster)
2.2 负载均衡集群(Load Balancing Cluster)
2.3 高可用集群(High Availability Cluster)
2.4 区别
…
第二门课:改善深层神经网络<超参数调试、正则化及优化>-深度学习的实用层面
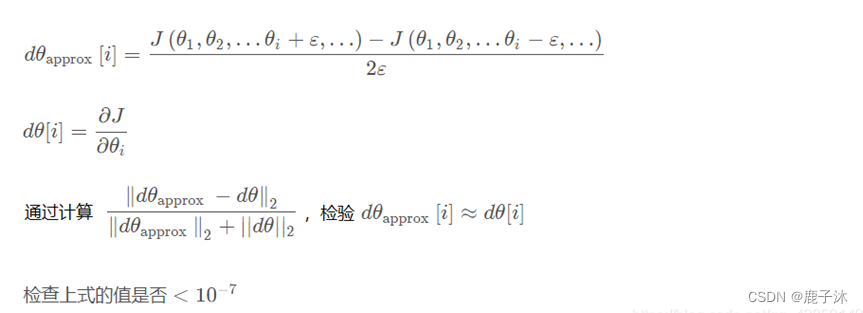
文章目录 1 训练集、验证集以及测试集2 偏差与方差3 机器学习基础4 正则化5 为什么正则化可以减少过拟合?6 Dropout<随机失活>正则化7 理解Dropout8 其他正则化方法9 归一化输入10 梯度消失和梯度爆炸11 神经网络的权重初始化12 梯度的数值逼近13 梯度检验14 …
Humanoid-Gym 开源人形机器人端到端强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布!
系列文章目录 前言
Humanoid-Gym: Reinforcement Learning for Humanoid Robot with Zero-Shot Sim2Real Transfer
GitHub Repository: GitHub - roboterax/humanoid-gym: Humanoid-Gym: Reinforcement Learning for Humanoid Robot with Zero-Shot Sim2Real Transfer 一、介…