本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/404615.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
C++中发送HTTP请求的方式
一,简介 使用C编程发送HTTP请求通常需要使用第三方的HTTP库或框架。在C中,有几个受欢迎的HTTP库可供选择,例如Curl、Boost.Beast和cpp-httplib。另外,也可以自己实现socket来发送http请求
二、使用Curl库发送HTTP请求
1. 确认当…
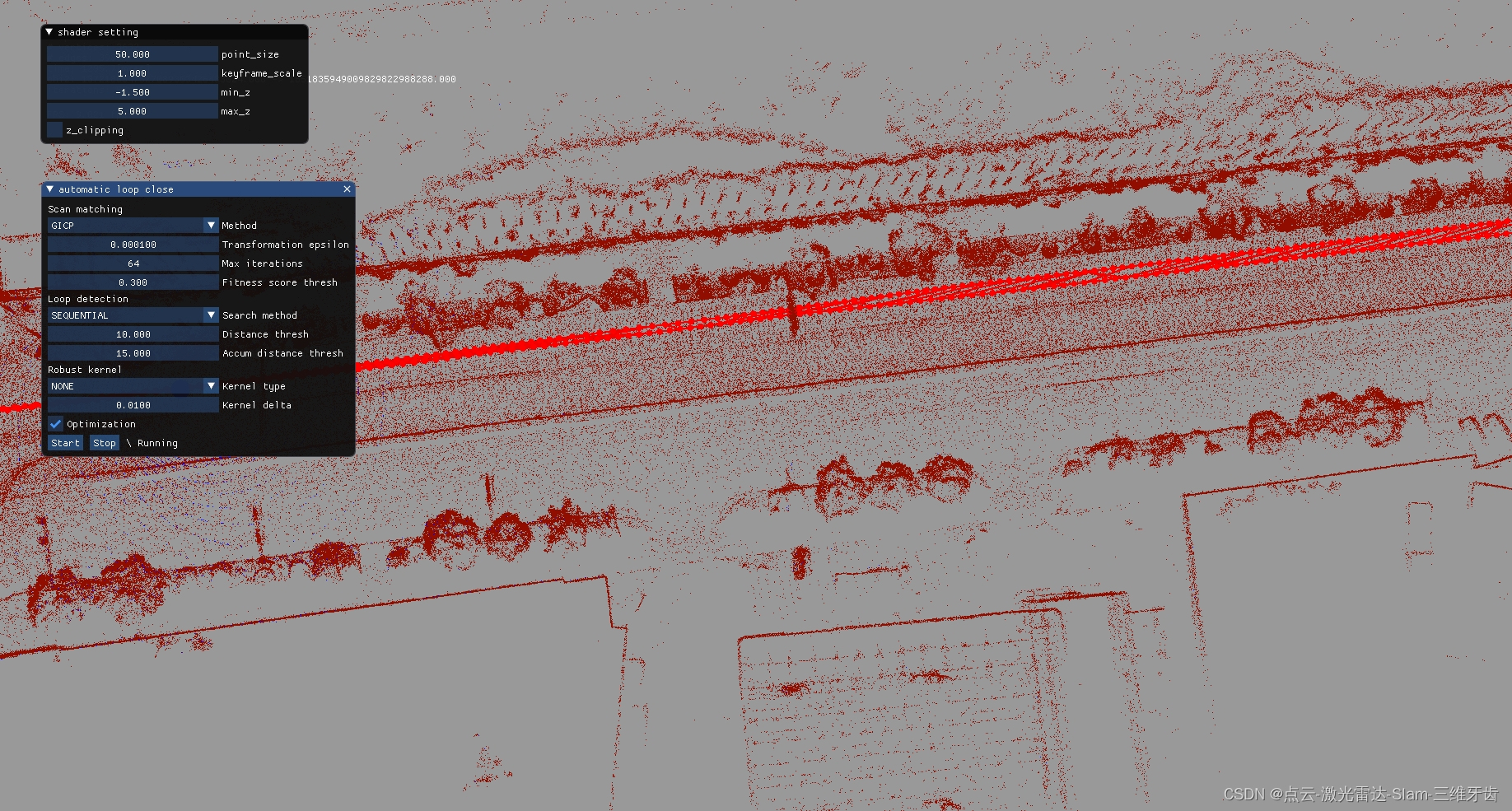
fastlio2 保存每帧的点云和每帧的里程计为单独的文件做后端回环优化和手动回环优化
为了 提供数据做后端回环优化和手动回环优化,需要保存每帧的点云和每帧的里程计为单独的文件,并且需要保存的名字为ros时间戳。 效果很好,比我自己写的手动回环模块好用
// This is an advanced implementation of the algorithm described in the
// following paper:
/…
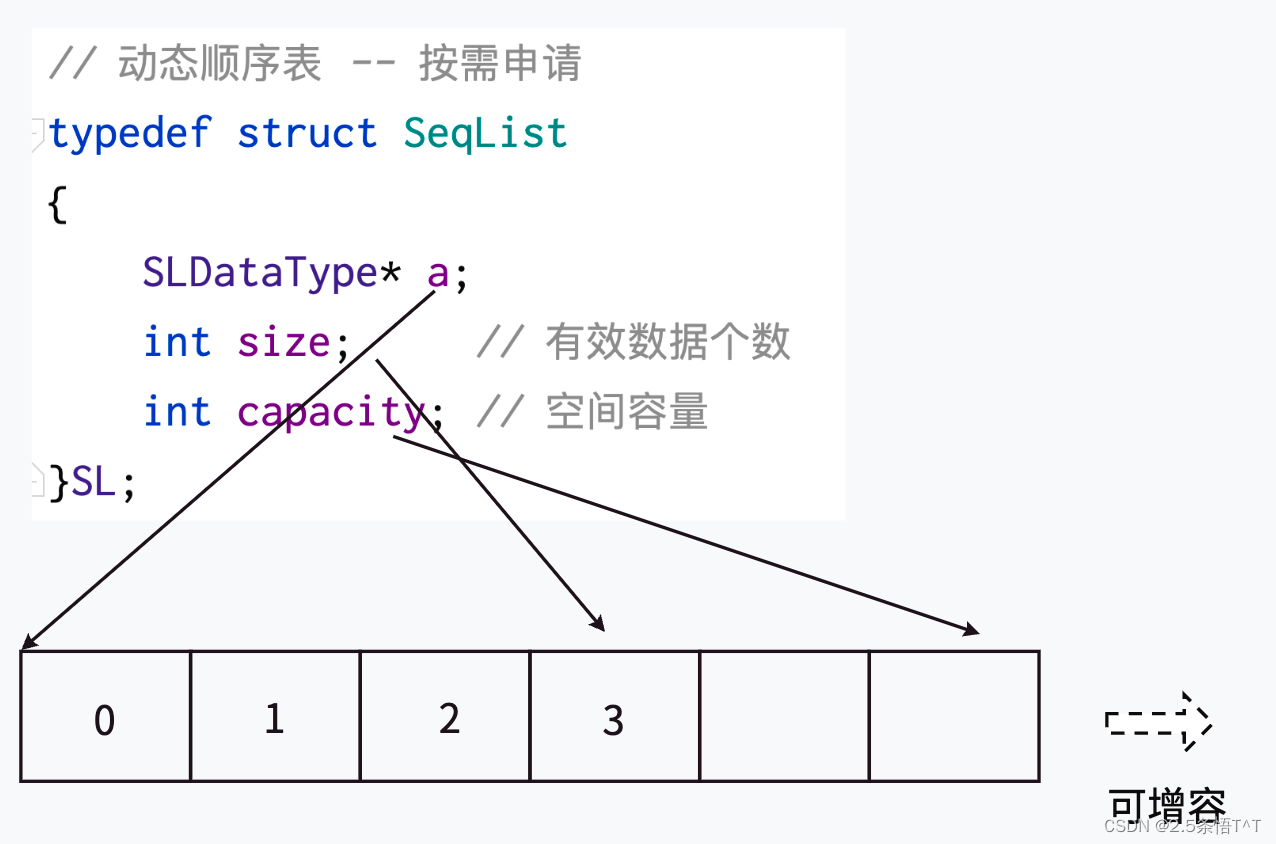
顺序表(1)——顺序表详解
什么是数据结构?
简单来说数据结构就是计算机储存,组织数据的方式,而数组就是最基础的数据结构。 那为什么会有数据结构的存在呢? 这需要将数据结构分成数据和结构两部分进行分析。 数据:我们在计算机屏幕上所看见的文…
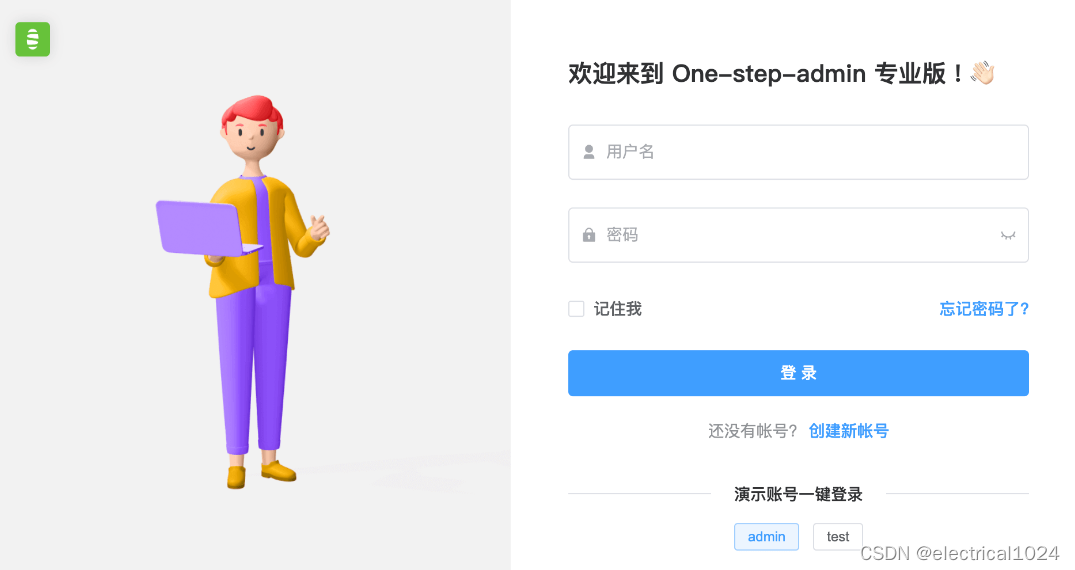
基于Vue3 中后台管理系统框架
基于Vue3 中后台管理系统框架 文章目录 基于Vue3 中后台管理系统框架一、特点二、源码下载地址 一款开箱即用的 Vue 中后台管理系统框架,支持多款 UI 组件库,兼容PC、移动端。vue-admin, vue-element-admin, vue后台, 后台系统, 后台框架, 管理后台, 管理…
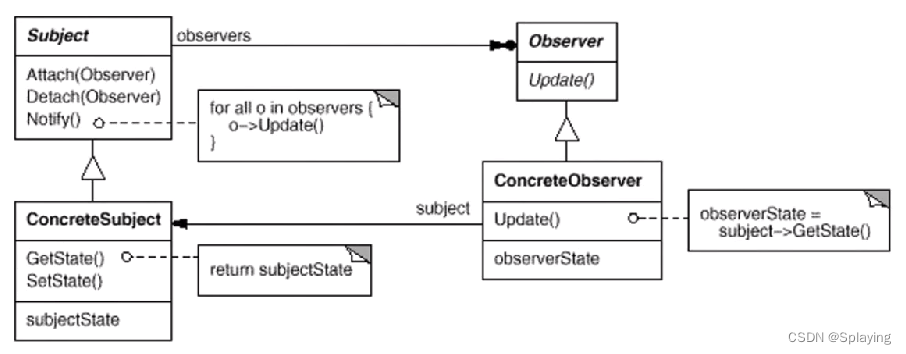
C++设计模式:观察者模式(三)
1、定义与动机
观察者模式定义:定义对象间的一种1对多(变化)的依赖关系,以便当一个对象(Subject)的状态发生比改变时,所有依赖于它的对象都得到通知并且自动更新
再软件构建过程中,…
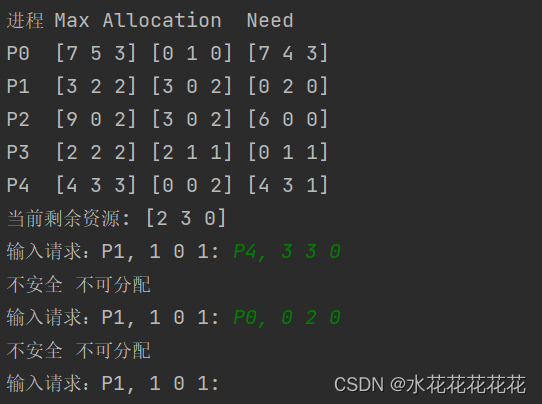
【操作系统】python实现银行家算法
银行家算法是最具有代表性的避免死锁的算法。 1、算法原理
银行家算法:当一个新进程进入系统时,该进程必须申明在运行过程中所需要的每种资源的最大数目,且该数目不能超过系统拥有的资源总量。当进程请求某组资源时,系统必须先确…

医疗器械5G智能制造工厂数字孪生可视化平台,推进行业数字化转型
医疗设备5G智能制造工厂数字孪生可视化平台,推进行业数字化转型。在数字化浪潮的推动下,医疗设备行业正迎来一场深刻的变革。5G技术的崛起,智能制造工厂的兴起,以及数字孪生可视化平台的出现,正在共同推动医疗设备行业…
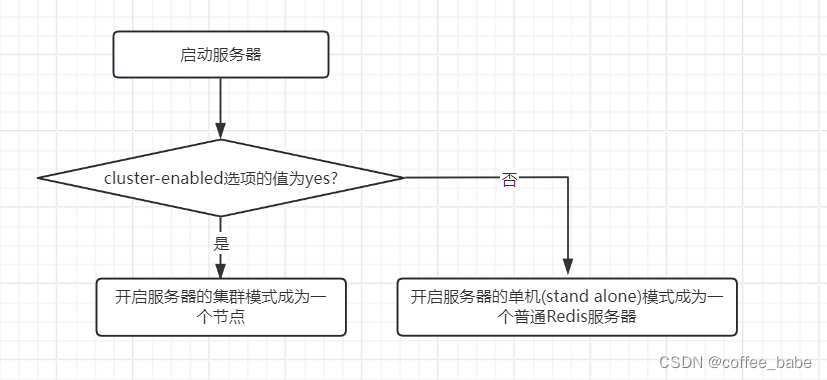
Redis中的集群(一)
集群
概述
Redis集群是Redis提供的分布式数据库方案,集群通过分片(sharding)来进行数据共享,并提供复制和故障转移功能
节点
一个Redis集群通常由多个节点(node)组成,在刚开始的时候,每个节点都是相互独立的,它们都…

spring事务那些事
实际工作中还会面临千奇百怪的问题,看下面返个例子(注意MySql数据库测试):
//1.hello1Service 调用 hello2Service
Transactional(propagation Propagation.REQUIRED,rollbackFor Exception.class)
public void doUpdate() {//…
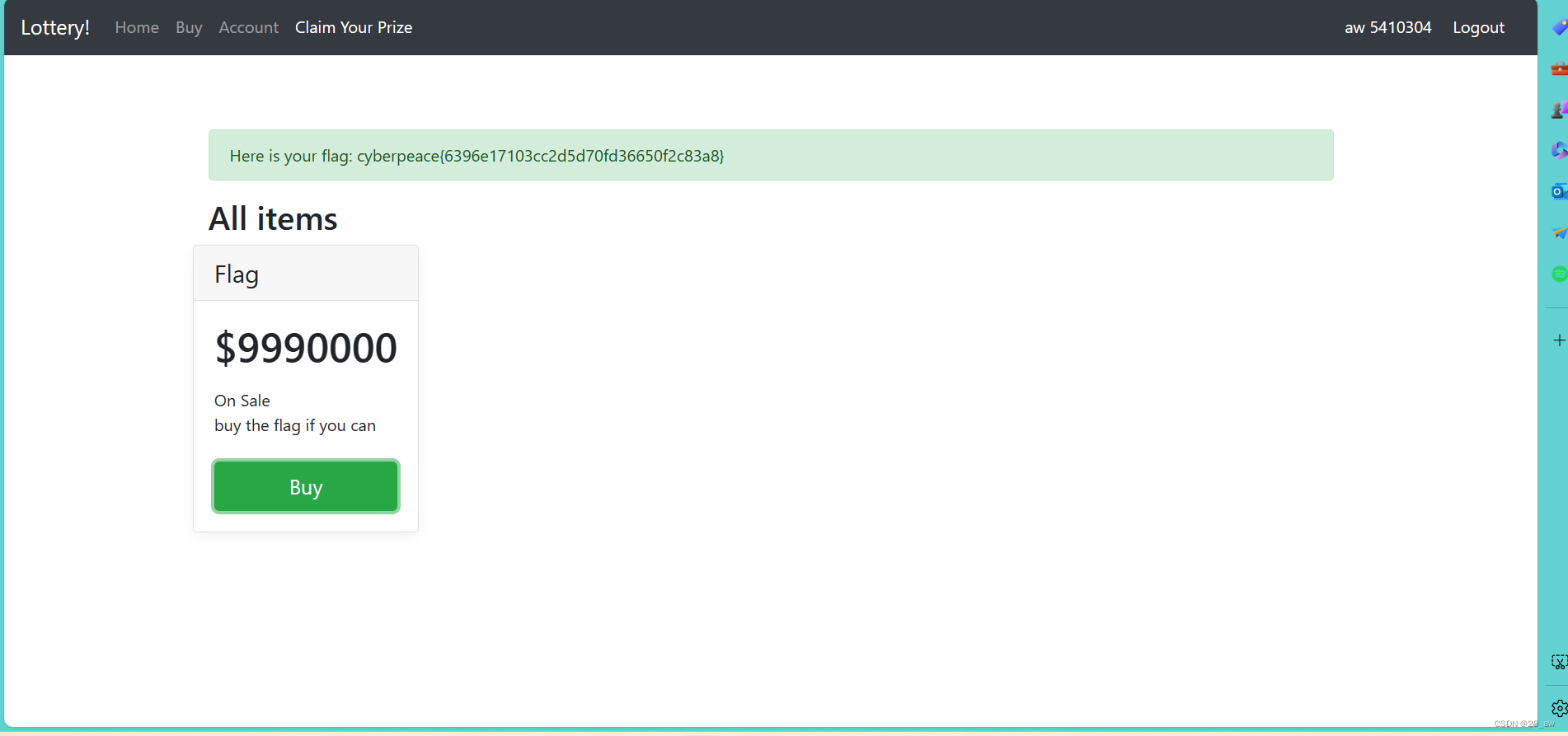
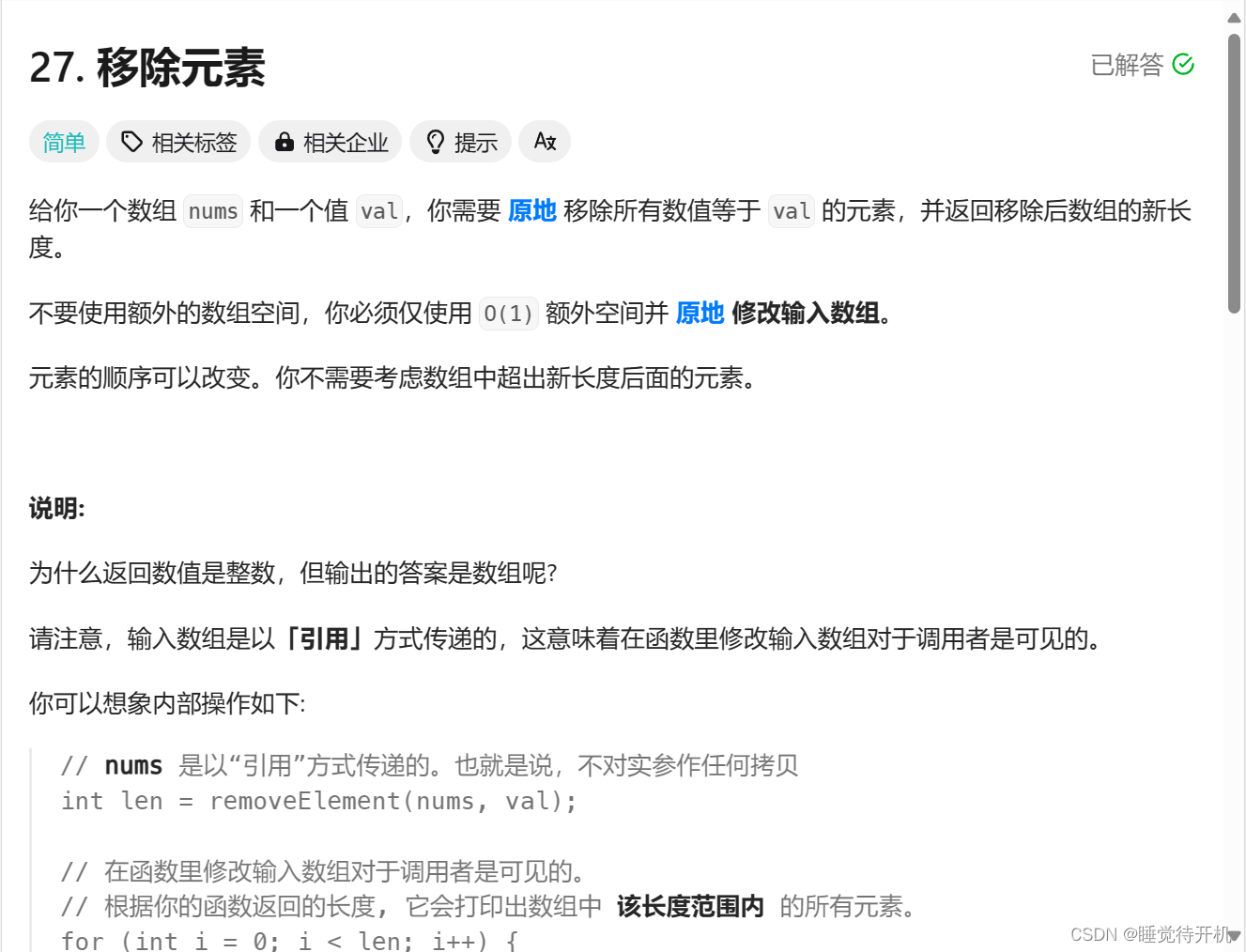
lottery-攻防世界
题目 flag在这里要用钱买,这是个赌博网站。注册个账号,然后输入七位数字,中奖会得到相应奖励。 githacker获取网站源码 ,但是找到了flag文件但是没用。 bp 抓包发现api.php,并且出现我们的输入数字。
根据题目给的附…
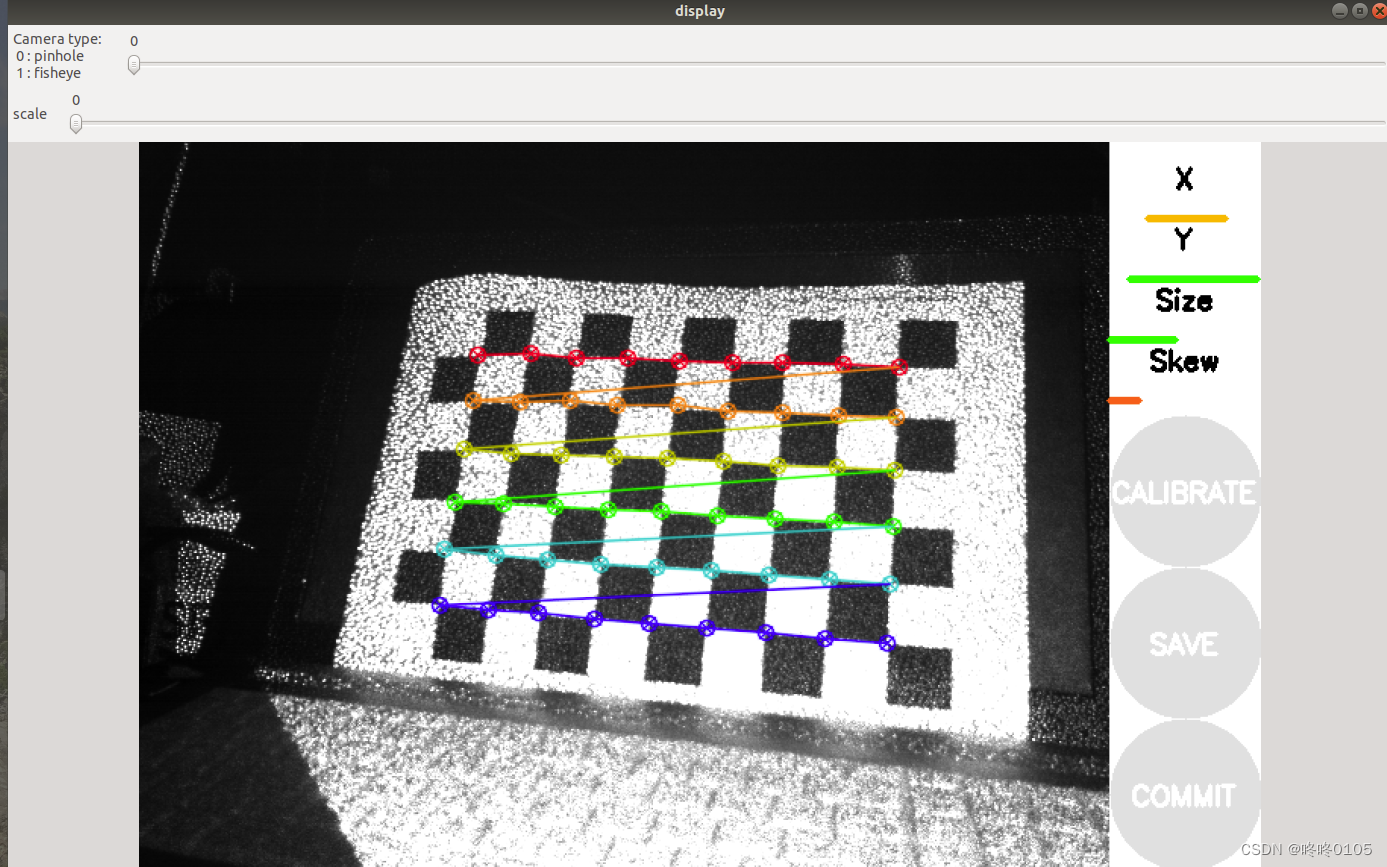
Astra深度相机在Ubuntu18.04系统下实现相机标定
问题: 当使用Astra相机的启动的指令启动相机后,使用rviz查看相机所发布的rgb数据时,在终端会出现如下的提示信息: Camera calibration file /home/car/.ros/camera_info/rgb_Astra_Orbbec.yaml not found. Camera calibration fil…

2012年认证杯SPSSPRO杯数学建模B题(第二阶段)节能减排全过程文档及程序
2012年认证杯SPSSPRO杯数学建模
节能减排、抑制全球气候变暖
B题 白屋顶计划
原题再现: 第二阶段问题 虽然环境学家对地球环境温度的改变有许多种不同观点,但大多数科学家可以达成一个基本的共识:近年来人类的活动,尤指二氧…

Vue - 你知道Vue组件之间是如何进行数据传递的吗
难度级别:中级及以上 提问概率:85% 这道题还可以理解为Vue组件之间的数据是如何进行共享的,也可以理解为组件之间是如何通信的,很多人叫法不同,但都是说的同一个意思。我们知道,在Vue单页面应用项目中,所有的组件都是被嵌套在App.vue内…
Linux——计算机进程基础知识
计算机基础知识
1.计算机组成五大部件:
(1) 运算器 :也叫算数逻辑单元,完成对数据的各种常规运算,如加减乘除,也包括逻辑运算,移位,比较等。
(2) 控制器 : 它是整个计算机系统的控制中心&…
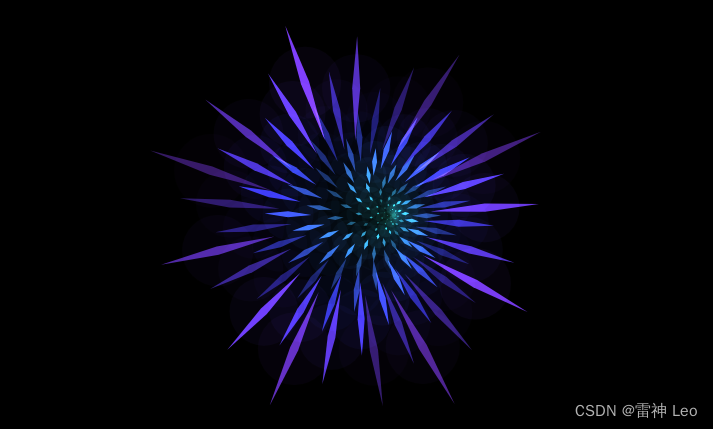
【HTML】简单制作一个动态变色光束花
目录
前言
开始
HTML部分
效果图
编辑编辑编辑编辑总结 前言 无需多言,本文将详细介绍一段代码,具体内容如下: 开始 首先新建文件夹,创建一个文本文档,其中HTML的文件名改为[index.html]&a…
【数据结构】复杂度(长期维护)
本篇博客主要是浅谈数据结构概念及时间复杂度,并做长期的维护更新,有需要借鉴即可。 复杂度目录 一、初识数据结构1.基础概念2.如何学好数据结构 二、复杂度1.复杂度2.时间复杂度①有限数的时间复杂度②函数的时间复杂度③二分查找时间复杂度④递归拓展练…


Mysql底层原理七:InnoDB 行记录
1.行格式 1.1 Compact行格式 1.1.1 示意图 1.1.2 准备一下 1)建表
mysql> CREATE TABLE record_format_demo (-> c1 VARCHAR(10),-> c2 VARCHAR(10) NOT NULL,-> c3 CHAR(10),-> c4 VARCHAR(10)-> ) CHARSETascii ROW_FORMATCOM…
考研数学|刷题用汤家凤《1800》还是张宇《1000》?看完这篇你就懂了
考研数学的复习是一个系统的过程,不同的习题集有各自的特点和适用场景。汤家凤的1800题和张宇的1000题都是非常受欢迎的考研数学复习资料,它们各有侧重点和优势。
汤家凤的1800题以其全面性和基础性著称,题目覆盖了考研数学的各个知识点&…

我院组织《医务人员如何构建良好人际关系》主题讲座
为进一步规范医务人员行为,熟练运用沟通技巧,掌握沟通技能,更好的为患者服务,提高工作效率。3月7日,北京精诚博爱医院护理部特别邀请了原海军总医院心理科郭勇教授,为临床医务工作者作了《心理健康教育之医…