本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/422212.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
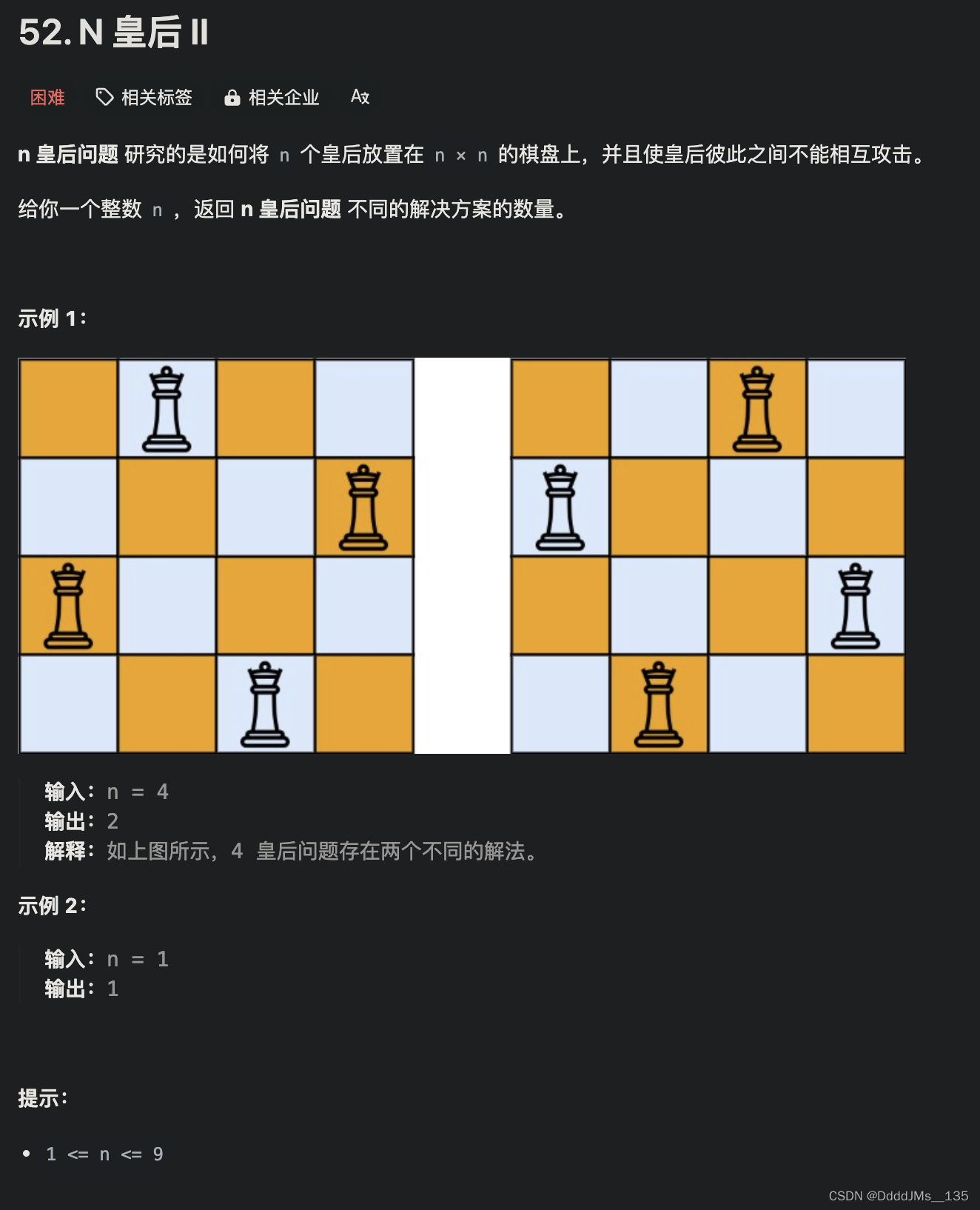
C语言 | Leetcode C语言题解之第52题N皇后II
题目: 题解:
struct hashTable {int key;UT_hash_handle hh;
};struct hashTable* find(struct hashTable** hashtable, int ikey) {struct hashTable* tmp NULL;HASH_FIND_INT(*hashtable, &ikey, tmp);return tmp;
}void insert(struct hashTabl…

万兆以太网MAC设计(12)万兆UDP协议栈上板与主机网卡通信
文章目录 一、设置IP以及MAC二、上板效果2.1、板卡与主机数据回环测试2.2、板卡满带宽发送数据 一、设置IP以及MAC
顶层模块设置源MAC地址
module XC7Z100_Top#(parameter P_SRC_MAC 48h01_02_03_04_05_06,parameter P_DST_MAC 48hff_ff_ff_ff_ff_ff
)(input …
鸿蒙内核源码分析(汇编基础篇) | CPU在哪里打卡上班
本篇通过拆解一段很简单的汇编代码来快速认识汇编,为读懂鸿蒙汇编打基础.系列篇后续将逐个剖析鸿蒙的汇编文件.
汇编很简单 第一: 要认定汇编语言一定是简单的,没有高深的东西,无非就是数据的搬来搬去,运行时数据主要…
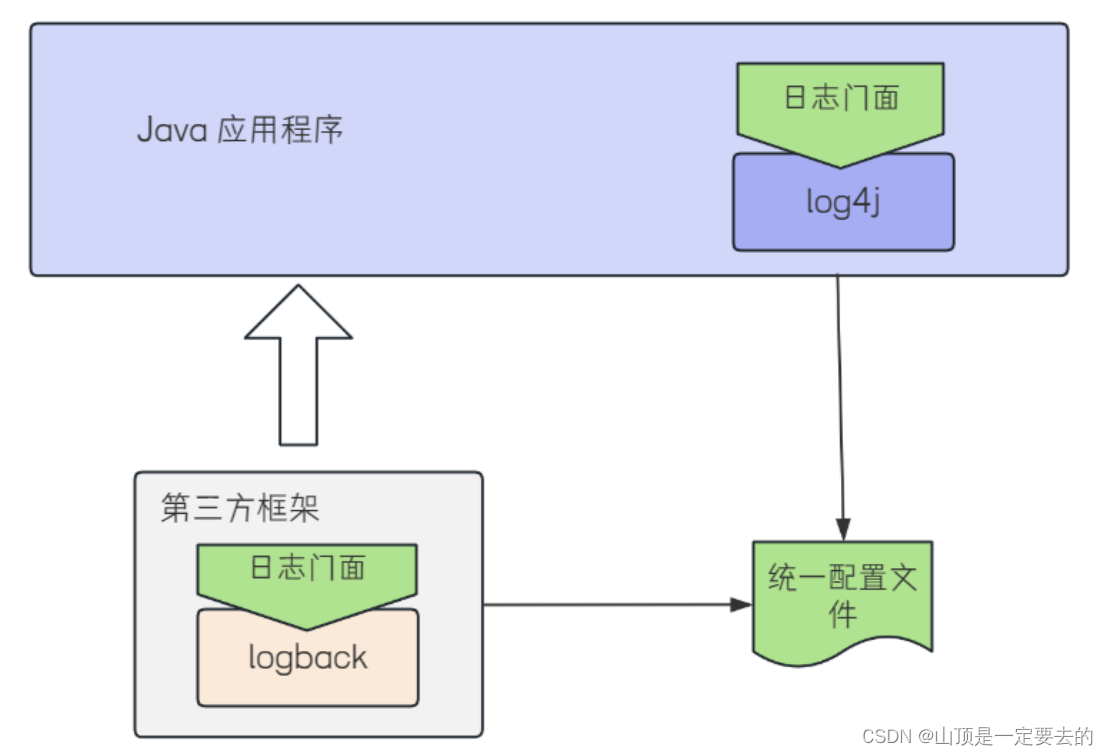
【Java EE】日志框架(SLF4J)与门面模式
文章目录 🍀SLF4j🌳门面模式(外观模式)🌸门面模式的定义🌸门面模式的模拟实现🌸门面模式的优点 🌲关于SLF4J框架🌸引入日志门面 ⭕总结 🍀SLF4j SLF4J不同于其他⽇志框架,它不是⼀个…

coreldraw2024精简版绿色版安装包免费下载
CorelDRAW 2024是一款矢量图形设计软件,于2024年3月5日正式在全球范围内发布。这款软件在多个方面进行了更新和改进,为用户提供了更多高效、灵活和便捷的设计工具。
首先,CorelDRAW 2024新增了绘画笔刷功能,这些笔刷不仅模拟了传…
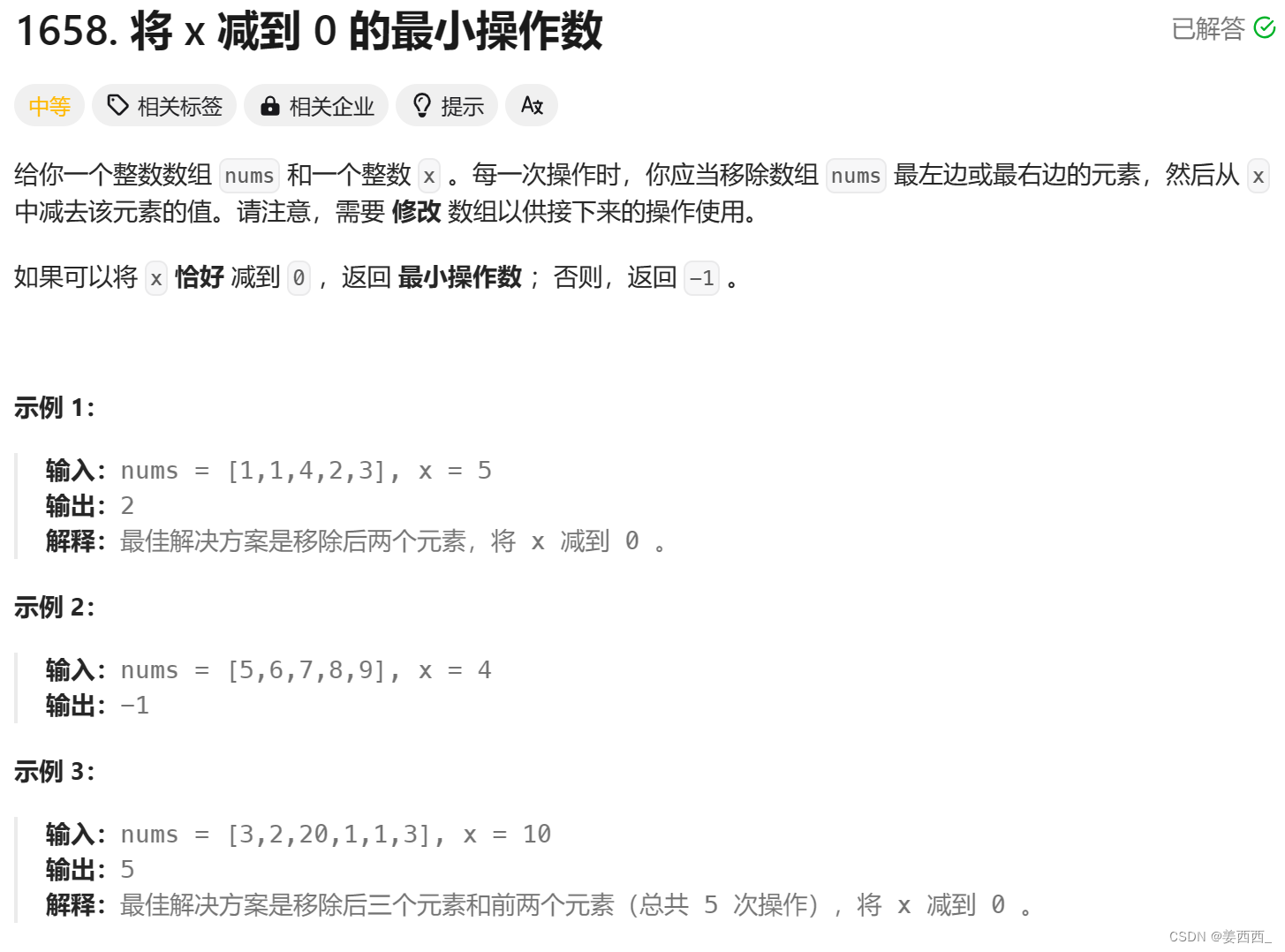
将x减小到0的最小操作数 ---- 滑动窗口
题目链接
题目: 分析:
题目中, 每次找到删除最左边或最右边的元素, 让x减去该元素, 看是否能减到0, 那么这道题如果按照题目的思路, 是非常难找的, 我们没有一个标准是删除最左边还是最右边, 所以我们转化思路: 找到一个最大的子数组, 使其和 > 数组全部元素的和 - x, 那么…
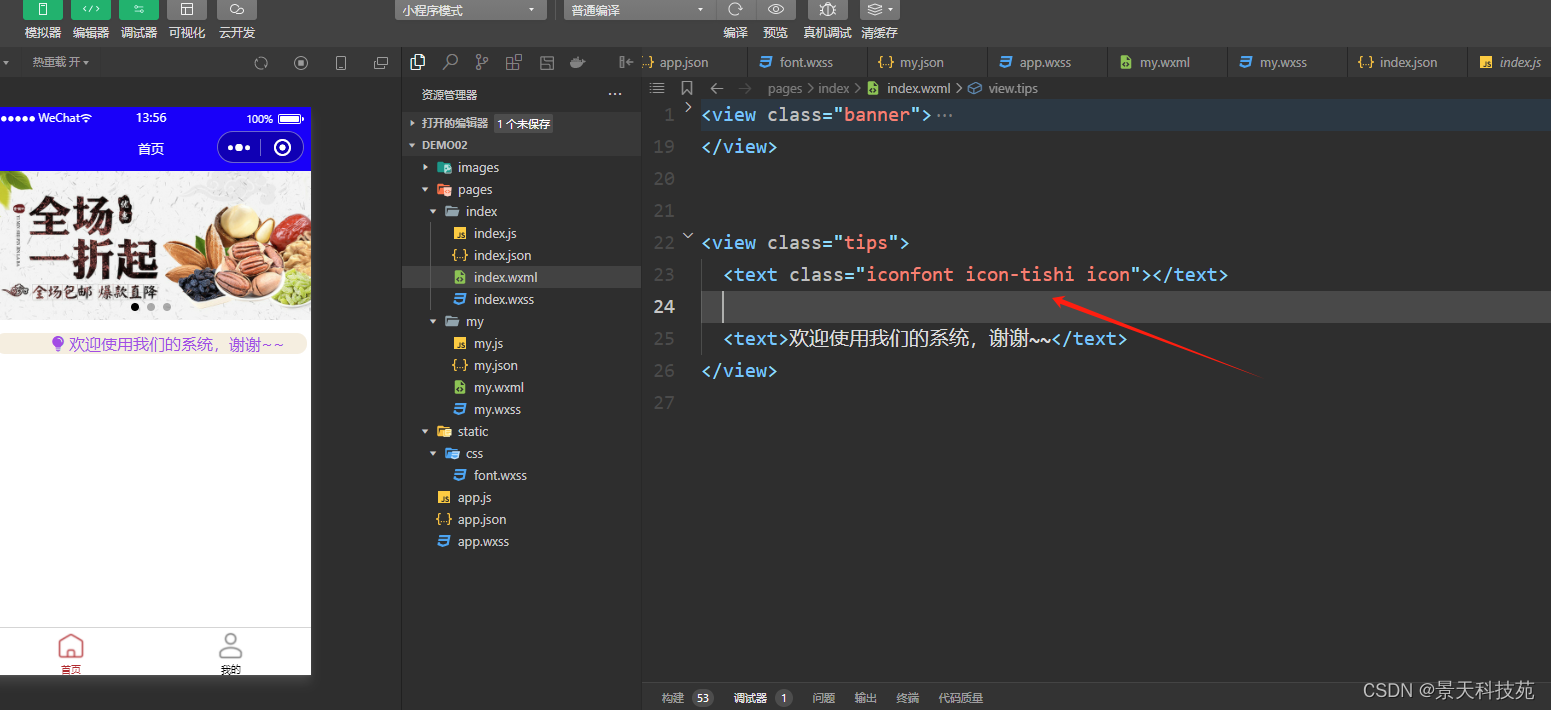
微信小程序开发核心:样式,组件,布局,矢量图标
✨✨ 欢迎大家来到景天科技苑✨✨
🎈🎈 养成好习惯,先赞后看哦~🎈🎈 🏆 作者简介:景天科技苑 🏆《头衔》:大厂架构师,华为云开发者社区专家博主,…

JavaEE技术之MySql高级(索引、索引优化、sql实战、View视图、Mysql日志和锁、多版本并发控制)
文章目录 1. MySQL简介2. MySQL安装2.1 MySQL8新特性2.2 安装MySQL2.2.1 在docker中创建并启动MySQL容器:2.2.2 修改mysql密码2.2.3 重启mysql容器2.2.4 常见问题解决 2.3 字符集问题2.4 远程访问MySQL(用户与权限管理)2.4.0 远程连接问题1、防火墙2、账号不支持远程…

星汉未来AI应用市场:一站式AI解决方案平台
星汉未来AI应用市场:一站式AI解决方案平台
在人工智能技术日益渗透到各行各业的今天,星汉未来AI应用市场为我们提供了一个集创新与实用于一体的平台。下面,我将为您详细介绍这个平台的各个方面。
平台特色
星汉未来AI应用市场是一个面向未…

【C++】学习笔记——string_1
文章目录 四、模板初阶2. 类模板 五、STL简介1. 什么是STL2. STL的六大组件3. 如何学习STL 六、string类1. string类对象的容量操作 未完待续 四、模板初阶
2. 类模板
函数模板就是:模板 函数;类模板就是:模板 类。和函数模板用法基本相同…
selenium 4.x入门篇(环境搭建、八大元素定位)
背景
Web自动化测现状 1. 属于 E2E 测试 2. 过去通过点点点 3. 好的测试,还需要记录、调试网页的细节 一、selenium4.x环境搭建
一键搭建
pip3 install webdriver-helper
安装后自动的完成: 1. 查看浏览器的版本号 2. 查询操作系统的类型…
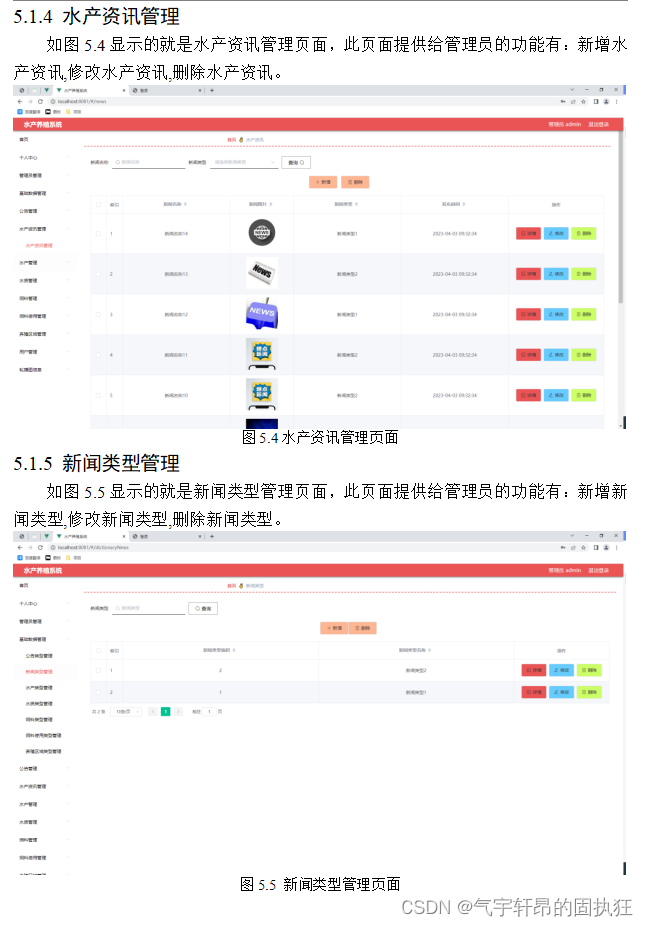
基于Springboot的水产养殖系统(有报告)。Javaee项目,springboot项目。
演示视频: 基于Springboot的水产养殖系统(有报告)。Javaee项目,springboot项目。 项目介绍:
采用M(model)V(view)C(controller)三层体系结构&…
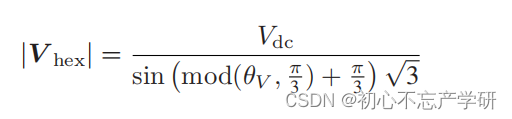
电机控制系列模块解析(12)—— 过调制
一、过调制
电机控制中的过调制(Overmodulation)是指在实施脉宽调制(PWM)过程中,使调制指数(调制深度)超过常规线性调制区的极限,进入非线性调制区域。这一策略通常应用于诸如空间矢…
【设计模式】工厂方法模式(Factory Method Pattern)
目录标题 工厂方法设计模式详解1. 介绍2. 结构3. 实现步骤3.1 创建抽象产品接口3.2 创建具体产品类3.3 创建抽象工厂接口3.4 创建具体工厂类3.5 客户端使用 4. 好处与优点5. 坏处与缺点6. 适用场景7. 总结 工厂方法设计模式详解
1. 介绍
工厂方法模式是一种创建型设计模式&am…
C++|STL-list运用(1)
cplusplus.com/reference/list/list/?kwlist
list介绍
list是一个双向循环链表,双向循环链表它的每个节点都有两个链接,一个指向前一个节点,另一个指向下一个节点,且最后一个结点指向头节点。 结点组成
1.数据域
2.指针域 &a…
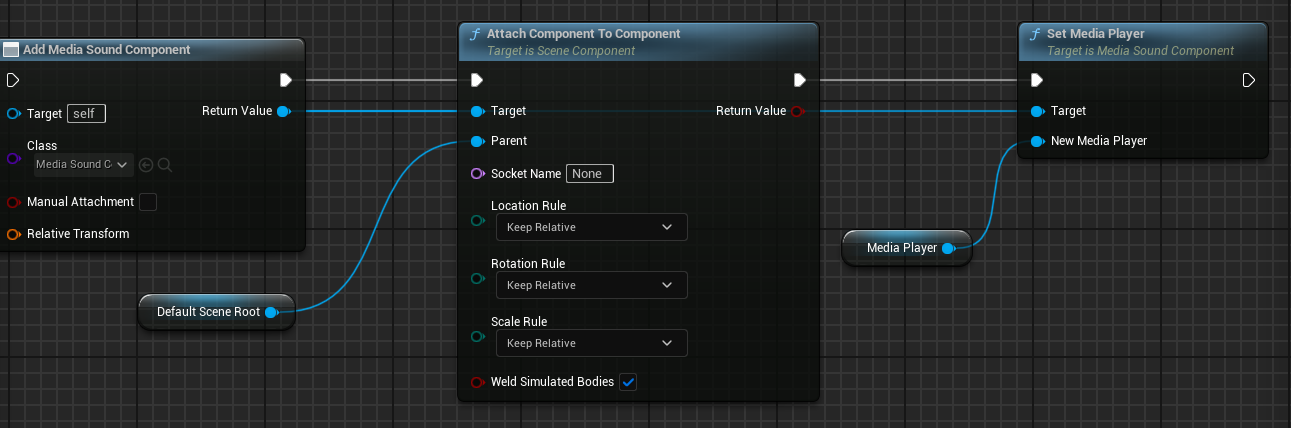
【UE5】动态播放媒体
最近项目中有一个需求,需要将场景中的42块屏幕都显示媒体内容,想着如果每一块屏幕都创建一个MediaPlayer资产、一个MediaSource资产、一个MediaTexture资产及创建对应的Material,就是4*42168个资产需要维护了,所以想着就全部采用动…
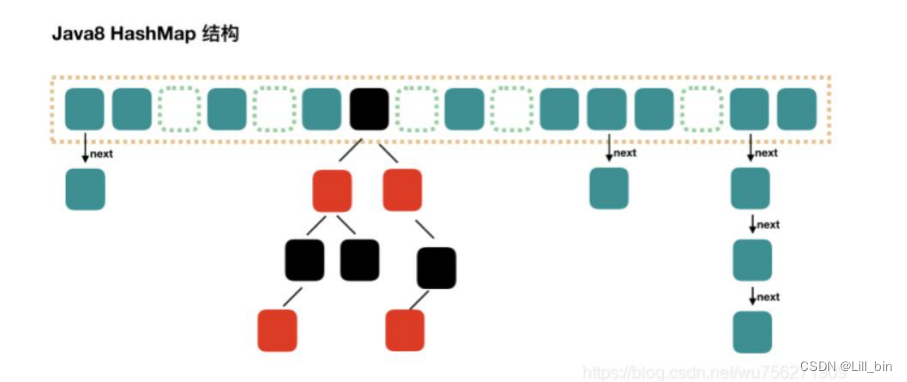
JAVA面试题分享--集合
常见的数据结构(了解)
常用的数据结构有:数组,栈,队列,链表,树,散列,堆,图等 数组是最常用的数据结构,数组的特点是长度固定,数组的大…

人工智能论文:BERT和GPT, GPT-2, GPT-3 的简明对比和主要区别
在BERT的论文里面: 2018.10 BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding,BERT已经解释了BERT,GPT,ELMo的区别。 *ELMo为双向RNN,请忽略。
主要区别:
BERT使用的是…