本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/database/80767.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

Prometheus 监控Harbor
你好!今天分享的是基于Prometheus监控harbor服务。
在之前的文章中分别介绍了harbor基于离线安装的高可用汲取设计和部署。那么,如果我们的harbor服务主机或者harbor服务及组件出现异常,我们该如何快速处理呢?
Harbor v2.2及以上…

SYN590RL 300MHz至450MHz ASK接收机芯片IC
一般描述 SYN590RL是赛诺克全新开发设计的一款宽电压范围,低功耗,高性能,无需外置AGC电容,灵敏度达到典型-110dBm,300MHz”450MHz 频率范围应用的单芯片ASK或OOK射频接收器。 SYN59ORL是一款典型的即插即用型单片高集成度无线接收器&…

Spring Boot:植物健康的智能守护者
2相关技术
2.1 MYSQL数据库 MySQL是一个真正的多用户、多线程SQL数据库服务器。 是基于SQL的客户/服务器模式的关系数据库管理系统,它的有点有有功能强大、使用简单、管理方便、安全可靠性高、运行速度快、多线程、跨平台性、完全网络化、稳定性等,非常…

npm run serve 提示异常Cannot read property ‘upgrade‘ of undefined
npm run serve 提示Cannot read property ‘upgrade’ of undefined 一般是proxy的target代理域名问题导致的,如下: 解决方案: proxy: { “/remoteDealerReportApi”: { target: ‘http://demo-.com.cn’, //此域名有问题,会导致…

MySQL全文索引检索中文
MySQL全文索引检索中文 5.7.6版本不支持中文检索,需要手动修改配置 ft_min_word_len 1 ,因为默认配置 4
SHOW VARIABLES LIKE ft%;
show VARIABLES like ngram_token_size;配置
修改 MySQL 配置文件
vim /etc/my.cnf在配置的 [mysqld] 下面添加**ft_…

基于大数据 Python+Vue 旅游推荐可视化系统(源码+LW+部署讲解+数据库+ppt)
!!!!!!!!!
会持续一直更新下去 有问必答 一键收藏关注不迷路
源码获取:https://pan.baidu.com/s/1aRpOv3f2sdtVYOogQjb8jg?pwdjf1d 提取码: jf1d
&#…

从0开始深度学习(16)——暂退法(Dropout)
上一章的过拟合是由于数据不足导致的,但如果我们有比特征多得多的样本,深度神经网络也有可能过拟合 1 扰动的稳健性
经典泛化理论认为,为了缩小训练和测试性能之间的差距,应该以简单的模型为目标,即模型以较小的维度的…

Python 自动化运维:Python基础知识
Python 自动化运维:Python基础知识
目录
📊 Python 基础复习 数据类型、控制结构与常用函数面向对象编程(OOP)与类的使用函数式编程概念与 lambda 表达式异常处理与日志记录的基本实践 1. 📊 Python 基础复习
数据…

IDEA初探:深入理解 Structure 功能
一、Structure - 类视图 Structure 是 IDEA 中的一个视图工具,它提供了对当前文件中结构元素的快速访问。通过 Structure,我们可以方便地查看和导航到代码中的各个部分,从而提高代码编辑和浏览的效率。
1.1 基本概念 Structure 视图以树形结…

Radar Fields: Frequency-Space Neural Scene Representations for FMCW Radar 笔记
Code
主要思想
文章提出了一种新的神经场表示方法——Radar Fields,用于从FMCW(调频连续波)雷达数据中恢复场景几何信息。与以往的依赖于光学成像(如RGB相机和LiDAR)的神经场方法不同,该研究利用了雷达的…
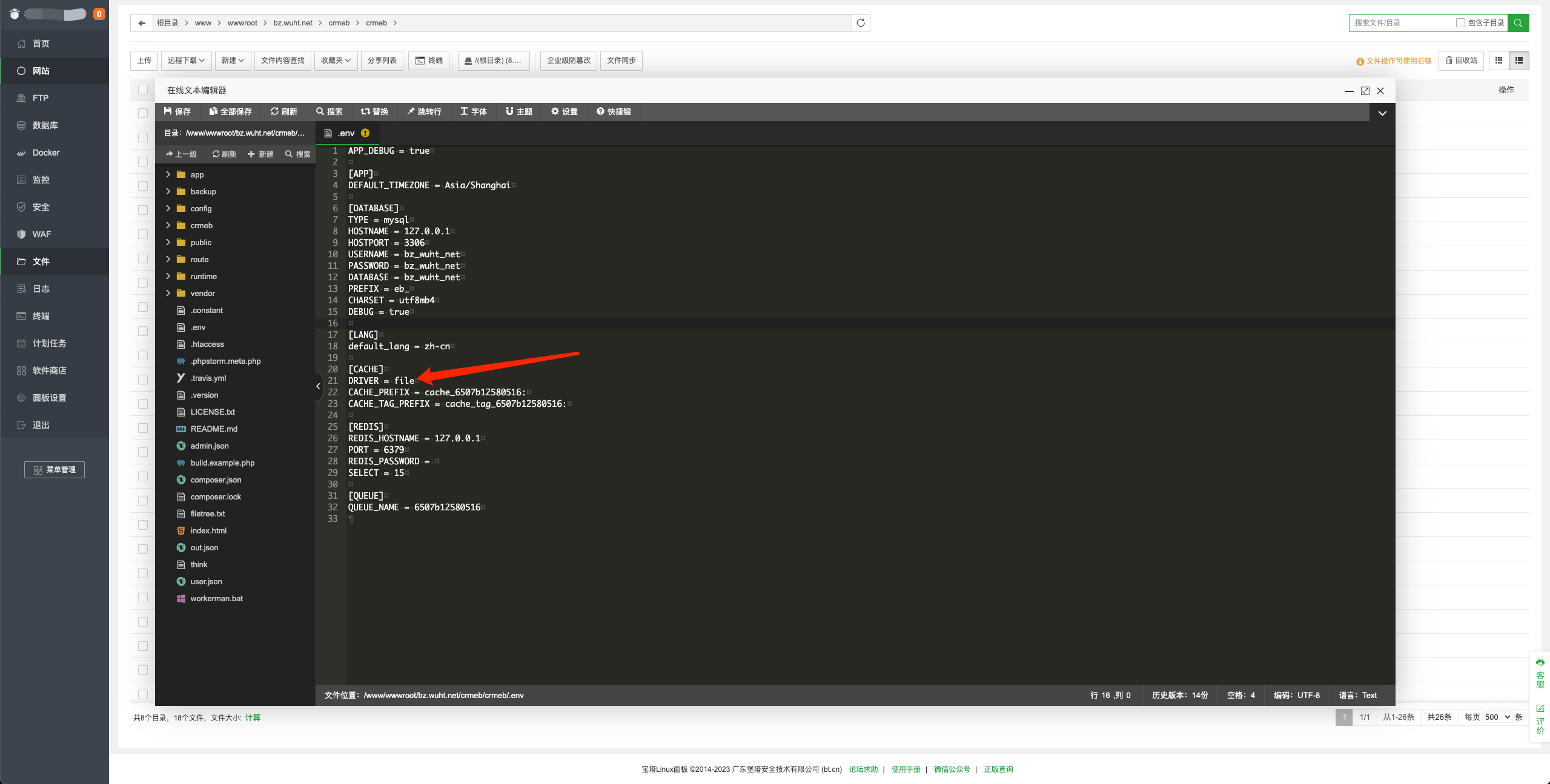
标准版如何切换缓存类型
标准版系统可以使用file和redis缓存,系统在安装的时候默认选择的是file缓存,可以在安装的时候修改缓存类型,这部分已经在安装的文档中进行说明
但是如果已经安装完成了,再修改缓存类型可以按照下方的说明进行修改
修改redis缓存…

机器视觉-相机、镜头、光源(总结)
目录
1、机器视觉光源概述
2、光源的作用
3、光谱
4、工业场景常见光源
4.1、白炽灯 4.2、卤素灯
4.3、 荧光灯
4.4、LED灯
4.5、激光灯 5、光源的基本性能
5.1、光通量
5.2、光效率
5.3、发光强度
5.4、光照度
5.5、均匀性
5.6、色温
5.7、显色性
6、基本光学…

SIP 业务举例之 Call Forwarding - No Answer(无应答呼叫转移)
目录
1. Call Forwarding - No Answer 简介
2. RFC5359 的 Call Forwarding - No Answer 信令流程
呼转开始
呼转完成
3. Call Forwording - No Answer 过程总结 博主wx:yuanlai45_csdn 博主qq:2777137742 想要 深入学习 5GC IMS 等通信知识(加入 51学通信),或者想要 …

spring-boot(4)
1.VueRouter安装与使用 2.状态管理VueX 3.Mock
如果后端没写好,可以通过这个来随机返回前端需要的后端数据,只不过是随机的。 vue: mounted:function (){console.log("-------------------------------------Hello");axios.get("http://…
c++:string类
想要深刻理解string类最好自己实现一个,可以看我的这篇文章:c:模拟实现string类-CSDN博客想要学好库中的string最好自己实现一个出来,能够加深对string的理解。蟹蟹观看!关注!评论!一键三连!htt…

关于Docker的docker engine stopped问题解决
问题图: 主要检查这两块 启用或关闭Windows功能如下图(将没开启的开启特别是Hyper-V,Linux,虚拟机等): 然后打开任务管理器搜索Docker service将关闭状态打开
运行管理员CMD执行如下命令 重启!!…

Coppelia Sim (v-REP)仿真 机器人3D相机手眼标定与实时视觉追踪 (一)
coppelia sim[V-REP]仿真实现 机器人于3D相机手眼标定与实时视觉追踪 一 标定板的制作生成标定的PDF文件PDF转为图像格式图像加载到仿真中 二 仿真场景设置加载机器人加载的控制dummy 
Ubuntu虚拟机无法启动,无U盘拯救
一 、背景 在Ubuntu手动源码安装glibc,直接手动将libc-2.34.so替换原libc-2.31.so,导致系统崩溃,基本指令无法使用// 正常指向
op@ubuntu ~ 15:49 $ ls /lib/x86_64-linux-gnu/libc.so.6 -alh
lrwxrwxrwx 1 root root 12 May 1 02:20 /lib/x86_64-linux-gnu/libc.so.6 ->…

使用Python计算相对强弱指数(RSI)进阶
使用Python计算相对强弱指数(RSI)进阶
废话不多说,直接上主题:>
代码实现
以下是实现RSI计算的完整代码: # 创建一个DataFramedata {DATE: date_list, # 日期CLOSE: close_px_list, # 收盘价格 }df pd.DataF…

创建型模式-----建造者模式
目录
背景:
构建模式UML
代码示例
房子成品: 构建器抽象: 具体构建器:
建筑师:
测试部…